GPS
Bibliotheken:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
Beschreibung
Der Block gibt verrauschte GPS-Messwerte basierend auf der eingegebenen Position und Geschwindigkeit im lokalen Koordinatensystem oder geodätischen System aus. Es verwendet das WGS84-Erdmodell, um lokale Koordinaten in Breiten-Längen-Höhen-Koordinaten (LLA) umzurechnen.
Beispiele
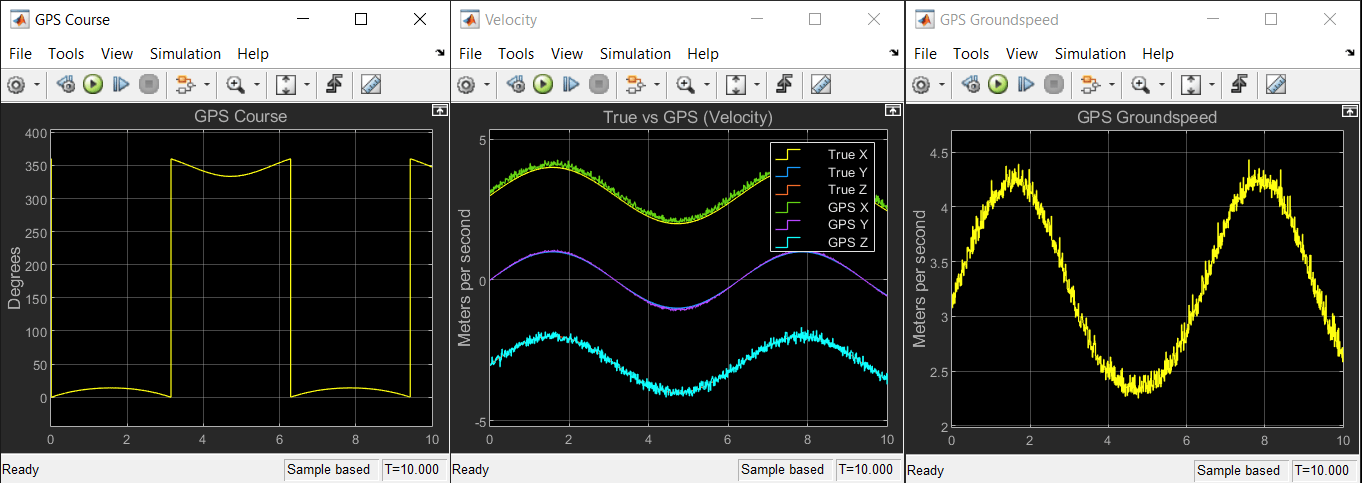
Simulate GPS Sensor Noise
Use the GPS block to add GPS sensor noise to position and velocity inputs in Simulink®.
Ports
Eingang
Geben Sie die Eingangsposition des GPS-Empfängers im Navigationskoordinatensystem als reelle, endliche N-mal-3-Matrix an. N ist die Anzahl der Abtastwerte im aktuellen Frame. Das Format der Matrixzeilen ist abhängig vom Wert des Parameters Position input format.
Wenn der Wert des Parameters Position input format gleich
Localist, geben Sie jede Zeile von Position als kartesische Koordinaten in Metern in Bezug auf das lokale Navigationsreferenzsystem an, das durch den Parameter Reference frame angegeben wird, wobei der Ursprung durch den Parameter Reference location angegeben wird.Wenn der Wert des Parameters Position input format gleich
Geodeticist, geben Sie jede Zeile der Eingabe Position als geodätische Koordinaten der Form[latitude longitude altitude]an. Die Werte vonlatitudeundlongitudesind in Grad angegeben.Altitudeist die Höhe über dem WGS84-Ellipsoidmodell in Metern.
Datentypen: single | double
Geben Sie die Eingangsgeschwindigkeit des GPS-Empfängers im Navigationskoordinatensystem in Metern pro Sekunde als reelle, endliche N-mal-3-Matrix an. N ist die Anzahl der Abtastwerte im aktuellen Frame. Das Format der Matrixzeilen ist abhängig vom Wert des Parameters Position input format.
Wenn der Wert des Parameters Position input format
Localist, geben Sie jede Zeile von Velocity in Bezug auf das lokale Navigationsreferenzsystem (NED oder ENU) an, das durch den Parameter Reference frame angegeben wird, wobei der Ursprung durch den Parameter Reference location angegeben wird.Wenn der Wert des Parameters Position input format
Geodeticist, geben Sie jede Zeile von Velocity in Bezug auf das Navigationsreferenzsystem (NED oder ENU) an, das durch den Parameter Reference frame angegeben wird, wobei der Ursprung durch Position angegeben wird.
Datentypen: single | double
Ausgabe
Position des GPS-Empfängers im geodätischen Breiten-, Längen- und Höhenkoordinatensystem (LLA), zurückgegeben als ein reelles, endliches N-mal-3-Array. Breitengrad und Längengrad werden in Grad angegeben, wobei Norden und Osten positiv sind. Die Höhe wird in Metern angegeben.
N ist die Anzahl der Abtastwerte im aktuellen Frame.
Datentypen: single | double
Die Geschwindigkeit des GPS-Empfängers im lokalen Navigationskoordinatensystem wird in Metern pro Sekunde als reelle, endliche N-mal-3-Matrix zurückgegeben. N ist die Anzahl der Abtastwerte im aktuellen Frame. Das Format der Matrixzeilen ist abhängig vom Wert des Parameters Position input format.
Wenn der Wert des Parameters Position input format gleich
Localist, bezieht sich die Ausgabe Velocity auf das lokale Navigationsreferenzsystem (NED oder ENU), das durch den Parameter Reference frame angegeben wird, wobei der Ursprung durch den Parameter Reference location angegeben wird.Wenn der Wert des Parameters Position input format gleich
Geodeticist, bezieht sich die Ausgabe Velocity auf das Navigationsreferenzsystem (NED oder ENU), das durch den Parameter Reference frame angegeben wird, wobei der Ursprung durch LLA angegeben wird.
Datentypen: single | double
Betrag der horizontalen Geschwindigkeit des GPS-Empfängers im lokalen Navigationskoordinatensystem in Metern pro Sekunde, zurückgegeben als reeller, endlicher N-elementiger Spaltenvektor.
N ist die Anzahl der Abtastwerte im aktuellen Frame.
Datentypen: single | double
Richtung der horizontalen Geschwindigkeit des GPS-Empfängers im lokalen Navigationskoordinatensystem, in Grad, zurückgegeben als reeller, endlicher N-elementiger Spaltenvektor mit Werten von 0 bis 360. Norden entspricht 0 Grad und Osten entspricht 90 Grad.
N ist die Anzahl der Abtastwerte im aktuellen Frame.
Datentypen: single | double
Parameter
Geben Sie das Bezugssystem als NED (Nord-Ost-Unten) oder ENU (Ost-Nord-Oben) an.
Geben Sie das Eingabeformat für die Positionskoordinaten als Local oder Geodetic an.
Wenn Sie diesen Parameter auf
Localsetzen, dann muss der Eingang für den Port Position in Form von kartesischen Koordinaten in Bezug auf das lokale Navigationssystem vorliegen, das durch den Parameter Reference Frame angegeben wird, wobei der Ursprung durch den Parameter Reference location festgelegt ist. Der Input an den Velocity-Eingangsport muss sich ebenfalls auf diesen lokalen Navigationsrahmen beziehen.Wenn Sie diesen Parameter auf
Geodeticsetzen, dann müssen die Eingangsdaten für den Port Position geodätische Koordinaten in[latitude longitude altitude]sein. Der Eingang des Velocity-Eingangsports muss sich ebenfalls auf den durch den Reference frame-Parameter angegebenen Navigationsrahmen beziehen, wobei der Ursprung dem Position-Port entspricht.
Geben Sie den Ursprung des lokalen Bezugssystems als dreielementigen Zeilenvektor in geodätischen Koordinaten [latitude longitude altitude] an, wobei altitude die Höhe über dem Referenzellipsoidmodell WGS84 ist. Die Referenzpositionswerte sind in Grad, Grad bzw. Metern angegeben. Das Gradformat ist Dezimalgrad (DD).
Abhängigkeiten
Um diesen Parameter zu aktivieren, setzen Sie den Parameter Position input format auf Local.
Geben Sie die Genauigkeit der horizontalen Position als nichtnegative reelle Skalargröße in Metern an. Die Genauigkeit der horizontalen Position gibt die Standardabweichung des Rauschens bei der Messung der horizontalen Position an. Eine Erhöhung dieses Wertes führt zu mehr Rauschen in der Messung und verringert deren Genauigkeit.
Einstellbar: Yes
Die Genauigkeit der vertikalen Position soll als nichtnegativer reeller Skalar in Metern angegeben werden. Die Genauigkeit der vertikalen Position gibt die Standardabweichung des Rauschens bei der Messung der vertikalen Position an. Eine Erhöhung dieses Wertes führt zu mehr Rauschen in der Messung und verringert deren Genauigkeit.
Einstellbar: Yes
Geben Sie die Geschwindigkeitsgenauigkeit pro Sekunde soll als nichtnegativer reeller Skalar in Metern an. Die Genauigkeit der Geschwindigkeitsmessung gibt die Standardabweichung des Rauschens bei der Geschwindigkeitsmessung an. Eine Erhöhung dieses Wertes führt zu mehr Rauschen in der Messung und verringert deren Genauigkeit.
Einstellbar: Yes
Geben Sie den globalen Positionsrauschdämpfungsfaktor als numerischen Skalar im Bereich [0, 1] an. Ein Abklingfaktor von 0 modelliert das globale Positionsrauschen als weißen Rauschprozess. Ein Abklingfaktor von 1 modelliert das globale Positionsrauschen als einen Zufallsprozess.
Einstellbar: Yes
Geben Sie den Startwert des Zufallszahlengenerators mt19937ar als nichtnegative ganze Zahl an.
Wählen Sie aus diesen Optionen den Simulationstyp aus, der ausgeführt werden soll:
Interpreted execution— Simulieren Sie das Modell mithilfe des MATLAB® Interpreters. Weitere Informationen finden Sie unter Interpreted Execution vs. Code Generation.Code generation— Simulieren Sie das Modell mithilfe des generierten C Codes. Wenn Sie zum ersten Mal eine Simulation ausführen, generiert Simulink® C Code für den Block. Der C Code wird für nachfolgende Simulationen wiederverwendet, solange sich das Modell nicht ändert.
Erweiterte Fähigkeiten
C/C++ Codegenerierung
Generieren von C und C++ Code mit Simulink® Coder™.
Versionsverlauf
Eingeführt in R2021b
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Website auswählen
Wählen Sie eine Website aus, um übersetzte Inhalte (sofern verfügbar) sowie lokale Veranstaltungen und Angebote anzuzeigen. Auf der Grundlage Ihres Standorts empfehlen wir Ihnen die folgende Auswahl: .
Sie können auch eine Website aus der folgenden Liste auswählen:
So erhalten Sie die bestmögliche Leistung auf der Website
Wählen Sie für die bestmögliche Website-Leistung die Website für China (auf Chinesisch oder Englisch). Andere landesspezifische Websites von MathWorks sind für Besuche von Ihrem Standort aus nicht optimiert.
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)