allanvar
Allan Varianz
Syntax
Beschreibung
Die Allan-Varianz wird verwendet, um die Frequenzstabilität von Schwingungen für eine Datenfolge im Zeitbereich zu messen. Darüber hinaus kann damit das Eigenrauschen eines Systems als Funktion der Mittelungszeit ermittelt werden. Die Mittelungszeitreihe τ kann als τ = m/fs angegeben werden. Hier ist fs die Abtastfrequenz der Daten und m eine Liste aufsteigender Mittelwertfaktoren (wie 1, 2, 4, 8, …).
[ gibt die Allan-Varianz avar,tau] = allanvar(Omega)avar als Funktion der Mittelungszeit tau zurück. Die Standard-Mittelungszeit tau ist eine Oktavfolge, die als (1, 2, ..., 2floor{log2[(N-1)/2]}) angegeben ist, wobei N die Anzahl der Samples in Omega ist. Wenn Omega als Matrix angegeben ist, operiert allanvar über die Spalten von omega.
Beispiele
Laden Sie Gyroskopdaten aus einer MAT-Datei, einschließlich der Abtastrate der Daten in Hz. Berechnen Sie die Allan-Varianz.
load('LoggedSingleAxisGyroscope','omega','Fs') [avar,tau] = allanvar(omega,'octave',Fs);
Zeichnen Sie die Allan-Varianz in einem loglog-Diagramm auf.
loglog(tau,avar) xlabel('\tau') ylabel('\sigma^2(\tau)') title('Allan Variance') grid on

Generieren Sie ein Beispiel für Gyroskoprauschen, einschließlich Winkel-Irrfahrt und Raten-Irrfahrt.
numSamples = 1e6; Fs = 100; nStd = 1e-3; kStd = 1e-7; nNoise = nStd.*randn(numSamples,1); kNoise = kStd.*cumsum(randn(numSamples,1)); omega = nNoise+kNoise;
Berechnen Sie die Allan-Abweichung bei bestimmten Werten von . Die Allan-Abweichung ist die Quadratwurzel der Allan-Varianz.
m = 2.^(9:18); [avar,tau] = allanvar(omega,m,Fs); adev = sqrt(avar);
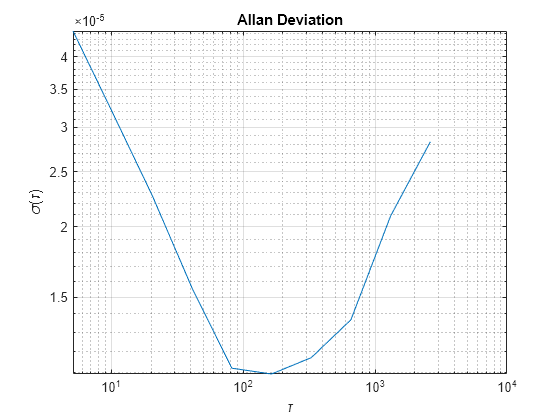
Zeichnen Sie die Allan-Abweichung in einem loglog-Diagramm auf.
loglog(tau,adev) xlabel('\tau') ylabel('\sigma(\tau)') title('Allan Deviation') grid on
Eingabeargumente
Ausgabeargumente
Versionsverlauf
Eingeführt in R2019a