Baseband PLL
Libraries:
Mixed-Signal Blockset /
PLL /
Architectures
Description
The Baseband PLL block models PLLs in the phase domain. The block accepts a real-valued phase offset vector and produces the outputs for a loop filter, phase detector, and VCO. The block acts as feedback control system that automatically adjusts the phase of a locally generated signal to match the phase of an input signal.
Examples
Open the model basebandPLLTB attached with this example.
model = 'basebandPLLTB';
open_system(model)
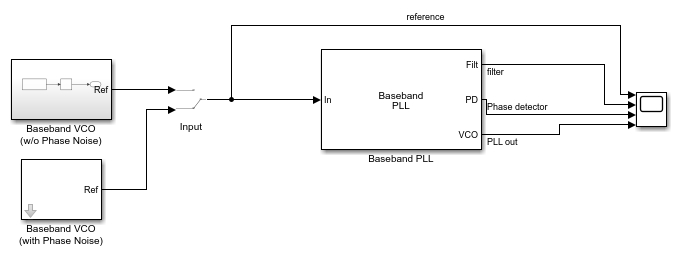
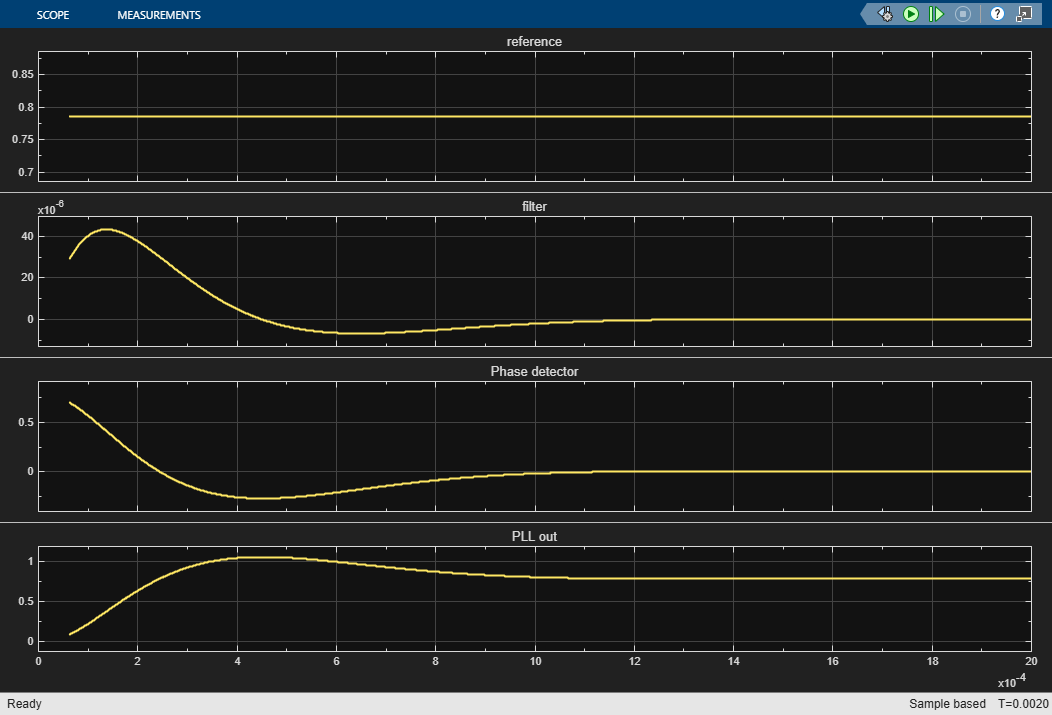
Connect the switch to the VCO without any phase noise. Run simulation.
set_param([model '/Input'],'sw','1'); sim(model);
To observe the effect of phase noise, change the switch position to connect the VCO with phase noise. Run simulation.
set_param([model '/Input'],'sw','0'); sim(model);
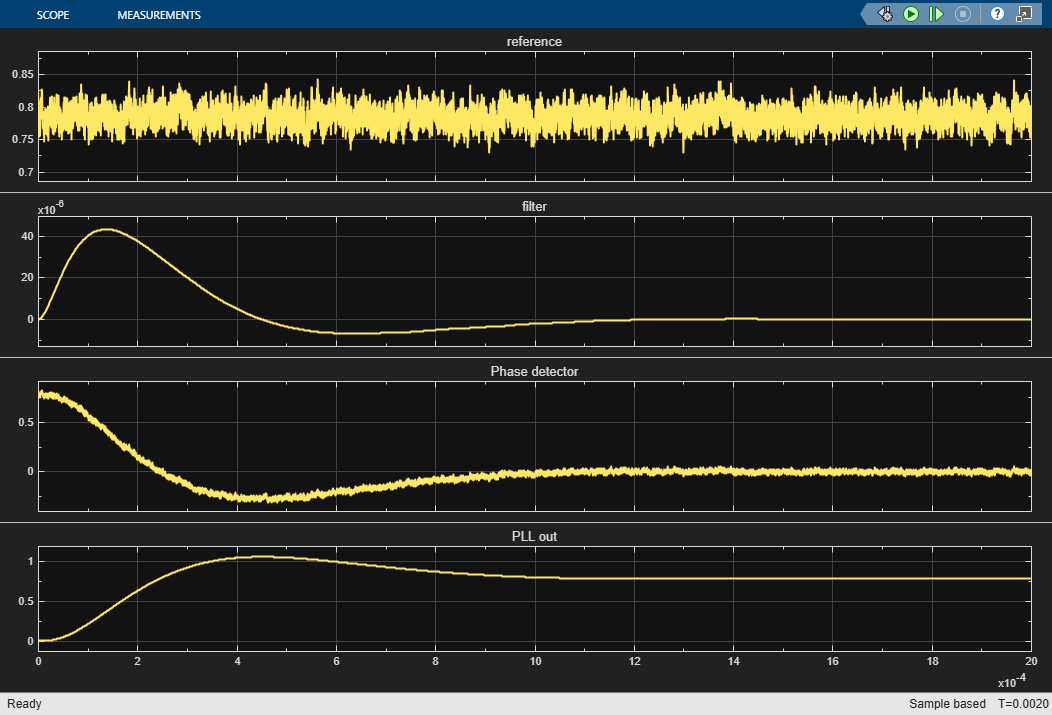
As you can see, even if you have a VCO signal with phase noise, the loop filter inside the Baseband PLL model is cleaning the effect of the phase noise to provide a clean PLL output.
Open the model basebandPLLLoopFilter attached with this example.
model = 'basebandPLLLoopFilter';
open_system(model)
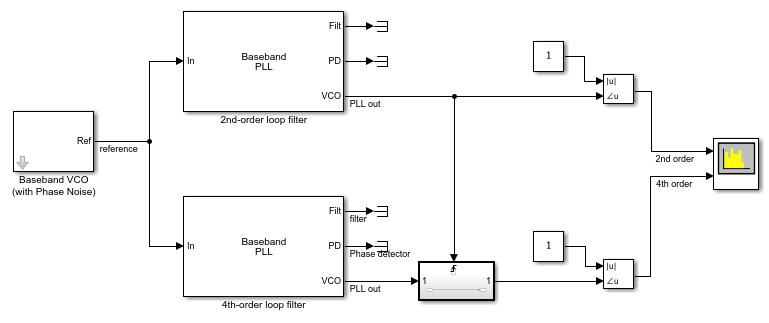
The model uses contains two loop filters, a 2nd-order passive loop filter and a 4th-order passive loop filter. All other parameters such as the loop bandwidth and phase margin are the same for both filters.
Run simulation to see the PLL outputs of both the filters.
sim(model);
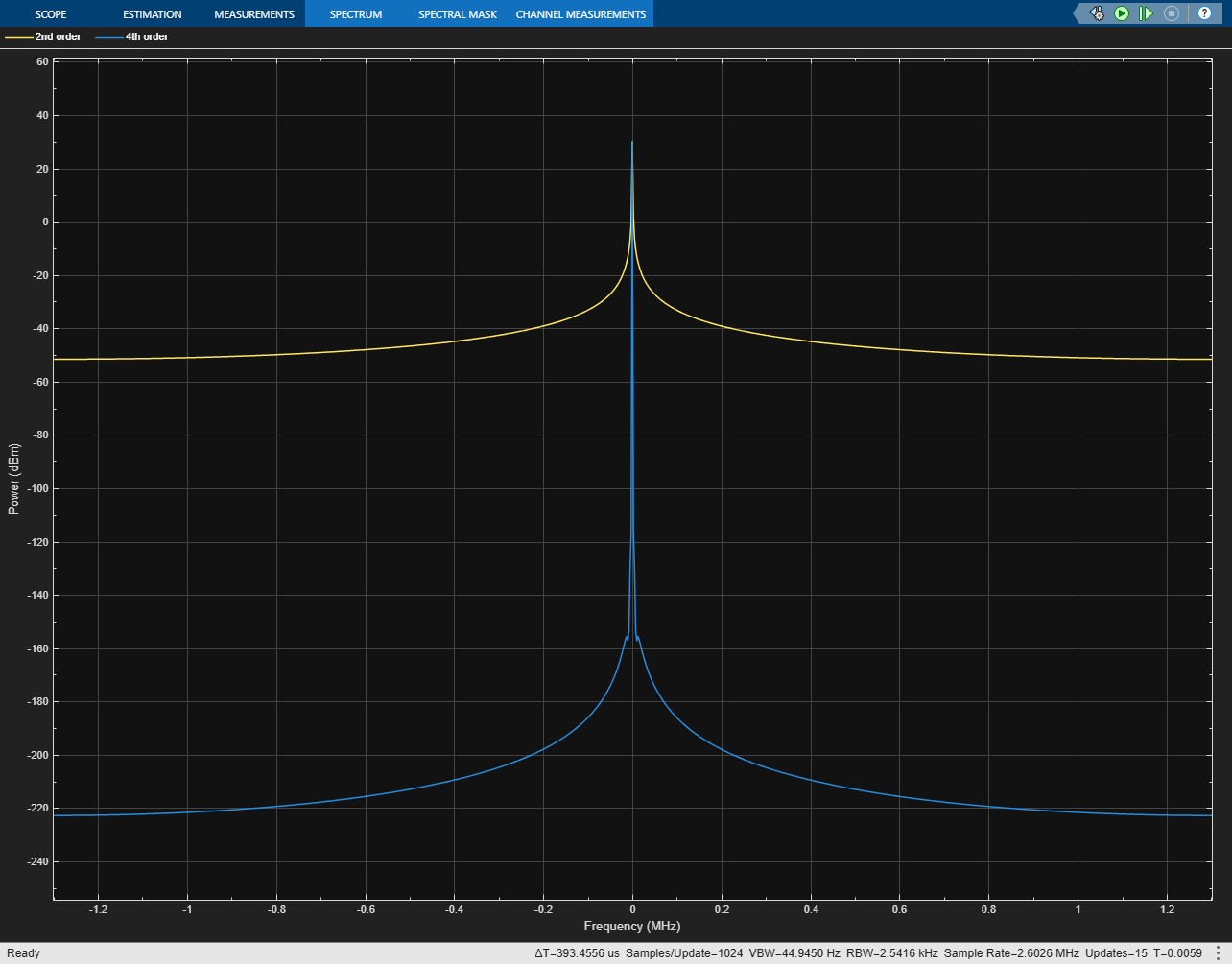
As you can see, the 4th-order loop filter better attenuates the noises at higher frequencies.
Ports
Input
Output
Parameters
Version History
Introduced in R2025a