buildMEX
Build MEX file that solves an MPC control problem
Syntax
Description
Linear MPC
Nonlinear MPC
mexNlnFcn = buildMEX(nlobj,mexName,coreData,onlineData)nlmpcmove. The MEX file is created in the current working
folder.
mexFcn = buildMEX(nlobj,mexName,coreData,onlineData,mexConfig)mexConfig. Use this syntax to customize your MEX code
generation.
Examples
Create a plant model and design an MPC controller for the plant, with sample time 0.1.
plant = drss(1,1,1);plant.D = 0; mpcobj = mpc(plant,0.1);
-->"PredictionHorizon" is empty. Assuming default 10. -->"ControlHorizon" is empty. Assuming default 2. -->"Weights.ManipulatedVariables" is empty. Assuming default 0.00000. -->"Weights.ManipulatedVariablesRate" is empty. Assuming default 0.10000. -->"Weights.OutputVariables" is empty. Assuming default 1.00000.
Simulate the plant using mpcmove for 5 steps.
x = 0; xc = mpcstate(mpcobj);
-->No sample time in plant model. Assuming controller's sample time of 0.1. -->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
for i=1:5 % Update plant output. y = plant.C*x; % Compute control actions. u = mpcmove(mpcobj,xc,y,1); % Update plant state. x = plant.A*x + plant.B*u; end
Display the final value of the plant output, input and next state.
[y u x]
ans = 1×3
0.9999 0.3057 -2.3063
Generate data structures and build mex file.
[coreData,stateData,onlineData] = getCodeGenerationData(mpcobj);
mexfun = buildMEX(mpcobj, 'myMPCMex', coreData, stateData, onlineData);Generating MEX function "myMPCMex" from linear MPC to speed up simulation. Code generation successful. MEX function "myMPCMex" successfully generated.
Simulate the plant using the mex file myMPCmex, which you just generated, for 5 steps.
x=0; for i = 1:5 % Update plant output. y = plant.C*x; % Update measured output in online data. onlineData.signals.ym = y; % Update reference signal in online data. onlineData.signals.ref = 1; % Compute control actions. [u,stateData] = myMPCMex(stateData,onlineData); % Update plant state. x = plant.A*x + plant.B*u; end
Display the final value of the plant output, input and next state.
[y u x]
ans = 1×3
0.9999 0.3057 -2.3063
Create a nonlinear MPC controller with four states, two outputs, and one input.
nlobj = nlmpc(4,2,1);
Zero weights are applied to one or more OVs because there are fewer MVs than OVs.
Specify the sample time and horizons of the controller.
Ts = 0.1; nlobj.Ts = Ts; nlobj.PredictionHorizon = 10; nlobj.ControlHorizon = 5;
Specify the state function for the controller, which is in the file pendulumDT0.m. This discrete-time model integrates the continuous-time model defined in pendulumCT0.m using a multistep forward Euler method.
nlobj.Model.StateFcn = "pendulumDT0";
nlobj.Model.IsContinuousTime = false;The prediction model uses an optional parameter Ts to represent the sample time. Specify the number of parameters and create a parameter vector.
nlobj.Model.NumberOfParameters = 1;
params = {Ts};Specify the output function of the model, passing the sample time parameter as an input argument.
nlobj.Model.OutputFcn = "pendulumOutputFcn";Define standard constraints for the controller.
nlobj.Weights.OutputVariables = [3 3]; nlobj.Weights.ManipulatedVariablesRate = 0.1; nlobj.OV(1).Min = -10; nlobj.OV(1).Max = 10; nlobj.MV.Min = -100; nlobj.MV.Max = 100;
Validate the prediction model functions.
x0 = [0.1;0.2;-pi/2;0.3]; u0 = 0.4; validateFcns(nlobj,x0,u0,[],params);
Model.StateFcn is OK. Model.OutputFcn is OK. Analysis of user-provided model, cost, and constraint functions complete.
Only two of the plant states are measurable. Therefore, create an extended Kalman filter for estimating the four plant states. Its state transition function is defined in pendulumStateFcn.m and its measurement function is defined in pendulumMeasurementFcn.m.
EKF = extendedKalmanFilter(@pendulumStateFcn,@pendulumMeasurementFcn);
Define initial conditions for the simulation, initialize the extended Kalman filter state, and specify a zero initial manipulated variable value.
x0 = [0;0;-pi;0]; y0 = [x0(1);x0(3)]; EKF.State = x0; mv0 = 0;
Create code generation data structures for the controller, specifying the initial conditions and parameters.
[coreData,onlineData] = getCodeGenerationData(nlobj,x0,mv0,params);
Specify the output reference value in the online data structure.
onlineData.ref = [0 0];
Build a MEX function for solving the nonlinear MPC control problem. The MEX function is created in the current working directory.
mexFcn = buildMEX(nlobj,"myController",coreData,onlineData);Generating MEX function "myController" from nonlinear MPC to speed up simulation. Code generation successful. MEX function "myController" successfully generated.
Run the simulation for 10 seconds. During each control interval:
Correct the previous prediction using the current measurement.
Compute optimal control moves using the MEX function. This function returns the computed optimal sequences in
onlineData. Passing the updated data structure to the MEX function in the next control interval provides initial guesses for the optimal sequences.Predict the model states.
Apply the first computed optimal control move to the plant, updating the plant states.
Generate sensor data with white noise.
Save the plant states.
mv = mv0; y = y0; x = x0; Duration = 10; xHistory = x0; for ct = 1:(Duration/Ts) % Correct previous prediction xk = correct(EKF,y); % Compute optimal control move [mv,onlineData] = myController(xk,mv,onlineData); % Predict prediction model states for the next iteration predict(EKF,[mv; Ts]); % Implement first optimal control move x = pendulumDT0(x,mv,Ts); % Generate sensor data y = x([1 3]) + randn(2,1)*0.01; % Save plant states xHistory = [xHistory x]; end
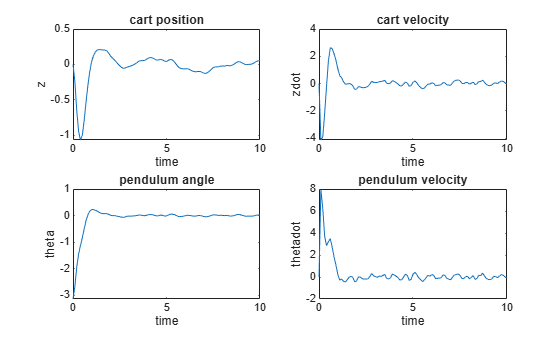
Plot the resulting state trajectories.
figure subplot(2,2,1) plot(0:Ts:Duration,xHistory(1,:)) xlabel('time') ylabel('z') title('cart position') subplot(2,2,2) plot(0:Ts:Duration,xHistory(2,:)) xlabel('time') ylabel('zdot') title('cart velocity') subplot(2,2,3) plot(0:Ts:Duration,xHistory(3,:)) xlabel('time') ylabel('theta') title('pendulum angle') subplot(2,2,4) plot(0:Ts:Duration,xHistory(4,:)) xlabel('time') ylabel('thetadot') title('pendulum velocity')
Input Arguments
Output Arguments
Version History
Introduced in R2020a
See Also
Functions
mpcmove|nlmpcmove|mpcmoveCodeGeneration|nlmpcmoveCodeGeneration|getCodeGenerationData|codegen(MATLAB Coder)