boundary
Boundary around a set of points in 2-D or 3-D
Description
Examples
Create and plot a set of random 2-D points.
rng default x = rand(30,1); y = rand(30,1); plot(x,y,".") xlim([-0.2 1.2]) ylim([-0.2 1.2])
Compute a boundary around the points using the default shrink factor.
k = boundary(x,y);
hold on;
plot(x(k),y(k));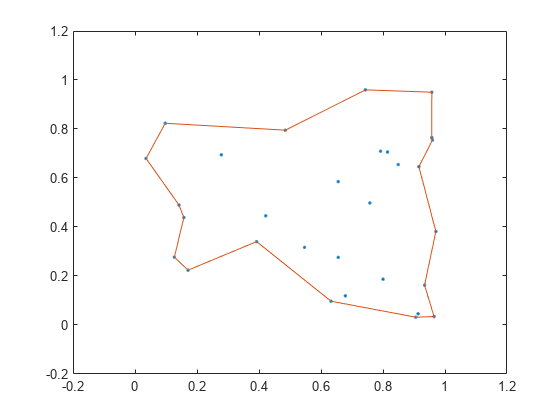
Create a new boundary around the points using a shrink factor of 0.1. The result is a less compact boundary enveloping the points.
j = boundary(x,y,0.1);
hold on
plot(x(j),y(j));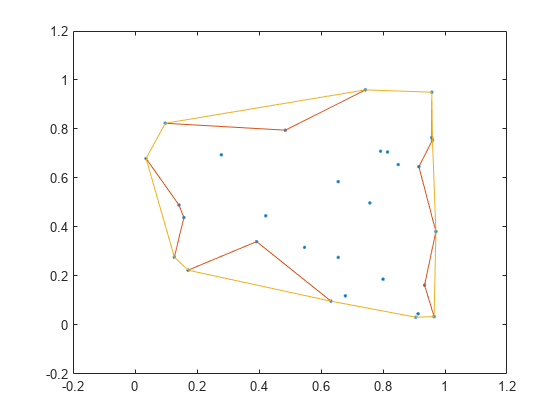
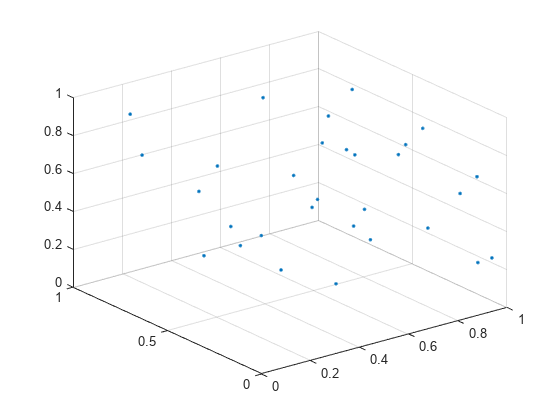
Create and plot a set of random 3-D points.
rng default P = rand(30,3); plot3(P(:,1),P(:,2),P(:,3),".",MarkerSize=10) grid on
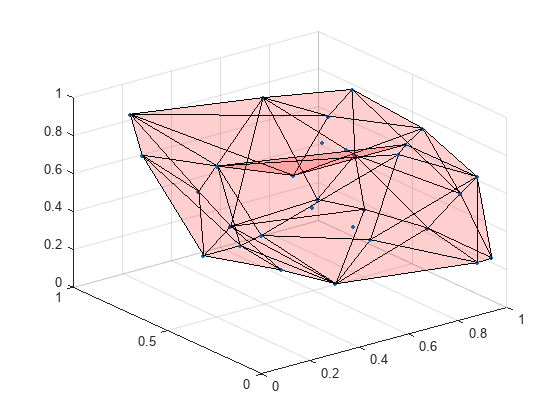
Plot the boundary using the default shrink factor.
k = boundary(P); hold on trisurf(k,P(:,1),P(:,2),P(:,3), ... Facecolor="red",FaceAlpha=0.1) hold off
Create and plot a set of random 3-D points.
rng default; P = rand(30,3); plot3(P(:,1),P(:,2),P(:,3),".") grid on
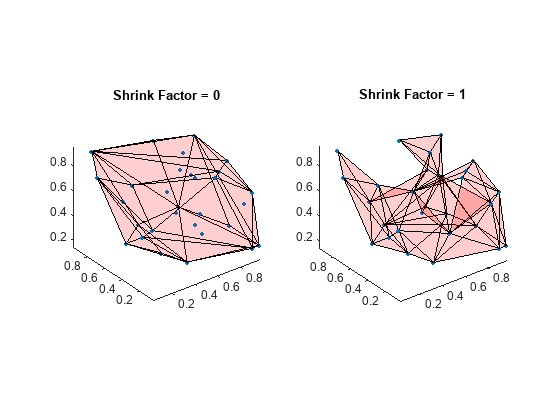
Compute two boundaries: one with a shrink factor of 0 and the other with a shrink factor of 1.
k = boundary(P,0); j = boundary(P,1);
Compare the shrink factors by plotting the original points and the two boundaries side-by-side.
subplot(1,2,1); plot3(P(:,1),P(:,2),P(:,3), ... ".",MarkerSize=10) hold on trisurf(k,P(:,1),P(:,2),P(:,3), ... FaceColor="red",FaceAlpha=0.1) axis equal title("Shrink Factor = 0") hold off subplot(1,2,2); plot3(P(:,1),P(:,2),P(:,3), ... ".",MarkerSize=10) hold on trisurf(j,P(:,1),P(:,2),P(:,3), ... FaceColor="red",FaceAlpha=0.1) axis equal title("Shrink Factor = 1")
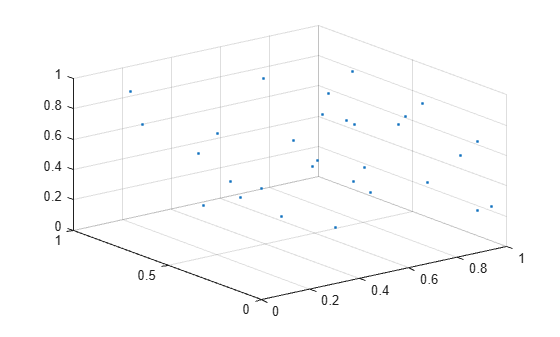
Create and plot a set of random 3-D points.
rng default P = rand(30,3); plot3(P(:,1),P(:,2),P(:,3),".") grid on
Use the boundary function to compute a boundary around the points, and find the volume of the resulting shape.
[~,vol] = boundary(P); vol
vol = 0.2962
Input Arguments
Output Arguments
Algorithms
boundary constructs an alphaShape from the specified points and then uses boundaryFacets to determine which points lie on the boundary.
Extended Capabilities
Version History
Introduced in R2014b
See Also
alphaShape | triangulation | delaunayTriangulation | trisurf | convhull