estimateLidarCameraTransform
Estimate rigid transformation from lidar sensor to camera
Syntax
Description
tform = estimateLidarCameraTransform(ptCloudPlanes,imageCorners)
tform = estimateLidarCameraTransform(ptCloudPlanes,imageCorners,intrinsics)
[___] = estimateLidarCameraTransform(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments in previous syntaxes. For example, Name,Value)'Verbose',true sets the
function to display progress.
Examples
Estimate the rigid transformation from a lidar sensor to a camera using point clouds captured with the lidar sensor and images captured with the camera.
Load Data
Load images and point cloud data into the workspace.
imageDataPath = fullfile(toolboxdir('lidar'),'lidardata',... 'calibration','images'); imds = imageDatastore(imageDataPath); imageFileNames = imds.Files; ptCloudFilePath = fullfile(toolboxdir('lidar'),'lidardata',... 'calibration','pointClouds'); pcds = fileDatastore(ptCloudFilePath,'ReadFcn',@pcread); ptCloudFileNames = pcds.Files;
Load camera intrinsics into the workspace.
cameraIntrinsicFile = fullfile(imageDataPath,'intrinsics.mat');
intrinsics = load(cameraIntrinsicFile).intrinsics;Detect Board Corners
Disable warning about using a symmetric board (not recommended). In this case, using a symmetric board does not affect the results because the padding is the same along every side of the board, and the board does not rotate more than 45 degrees in the collected images.
currentState = warning; warning("off","vision:calibrate:boardShouldBeAsymmetric")
Detect the checkerboard points.
[imagePoints,patternDims] = detectCheckerboardPoints(imageFileNames,PartialDetections=false);
Restore the original warning state.
warning(currentState)
Specify the size of the checkerboard squares in millimeters.
squareSize = 100;
Specify the padding of the board in millimeters.
padding = [100 100 100 100];
Estimate the board corners in the camera frame.
[cornersCamera,boardSize] = estimateBoardCornersCamera("checkerboard",imagePoints,... intrinsics,patternDims,squareSize,Padding=padding);
Preprocess the point clouds.
numPtClouds = numel(ptCloudFileNames); ptCloudArr = repmat(pointCloud(zeros(0, 3)),numPtClouds,1); for i = 1:numPtClouds ptCloud = pcread(ptCloudFileNames{i}); % Remove ground from point cloud. [~,ptCloud] = segmentGroundSMRF(ptCloud,MaxWindowRadius = 8,ElevationThreshold = 0.2,ElevationScale = 1.25); ptCloudArr(i) = ptCloud; end
Specify the cluster threshold to cluster each point cloud for board detection.
clusterThreshold = 0.05;
Estimate the board corners in the lidar frame.
[cornersLidar,ptCloudBoard] = estimateBoardCornersLidar(ptCloudArr,clusterThreshold,boardSize);
Calibrate and Visualize Results
[tform,errors] = estimateLidarCameraTransform(ptCloudBoard, ...
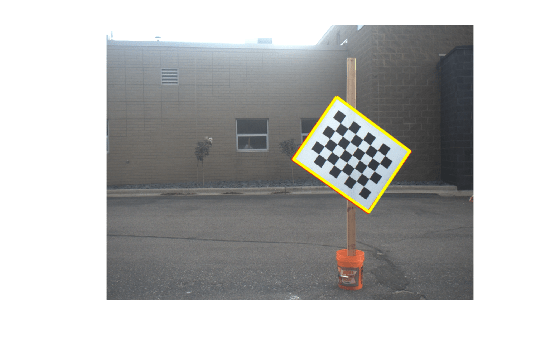
cornersCamera,intrinsics,Lidar3DCorners=cornersLidar);Visualize the alignment of the board corners in the first image and point cloud pair.
% Read and undistort the first image. idxDataPair = 1; I = imread(imageFileNames{idxDataPair}); J = undistortImage(I,intrinsics); % Project the board corner points from the camera and lidar to the image % for visualization. projectedCornersCamera = projectLidarPointsOnImage(cornersCamera(:,:,idxDataPair),intrinsics,rigidtform3d); projectedCornersLidar = projectLidarPointsOnImage(cornersLidar(:,:,idxDataPair),intrinsics,tform); figure imshow(J) hold on showShape("polygon",projectedCornersCamera,Color="red") showShape("polygon",projectedCornersLidar,Color="yellow")
Display translation, rotation, and reprojection errors in bar graphs.
figure bar(errors.TranslationError) xlabel('Frame Number') title('Translation Error (meters)')
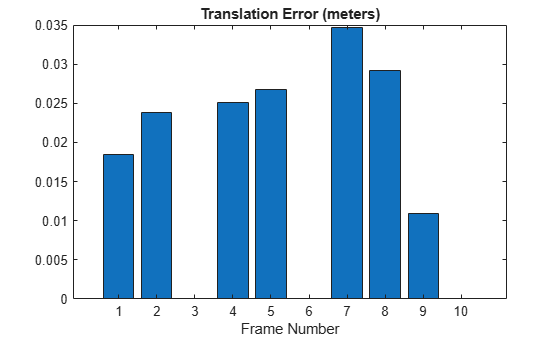
figure bar(errors.RotationError) xlabel('Frame Number') title('Rotation Error (degrees)')

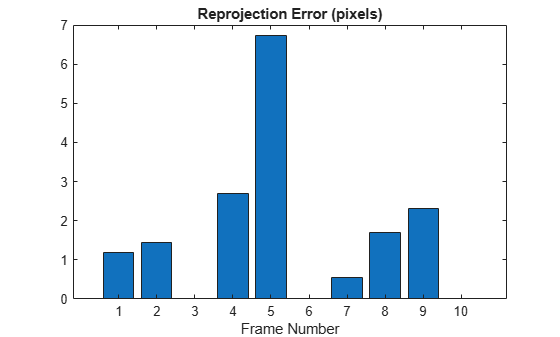
figure bar(errors.ReprojectionError) xlabel("Frame Number") title("Reprojection Error (pixels)")
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Zhou, Lipu, Zimo Li, and Michael Kaess. “Automatic Extrinsic Calibration of a Camera and a 3D LiDAR Using Line and Plane Correspondences.” 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, October 2018, 5562–69. https://doi.org/10.1109/IROS.2018.8593660.
[2] Arun, K. S., T. S. Huang, and S. D. Blostein. “Least-Squares Fitting of Two 3-D Point Sets.” IEEE Transactions on Pattern Analysis and Machine Intelligence PAMI-9, no. 5 (1987): 698–700. https://doi.org/10.1109/TPAMI.1987.4767965.