randomAffine3d
Create randomized 3-D affine transformation
Description
tform = randomAffine3daffinetform3d
object that performs an identity transformation.
tform = randomAffine3d(Name,Value)
Examples
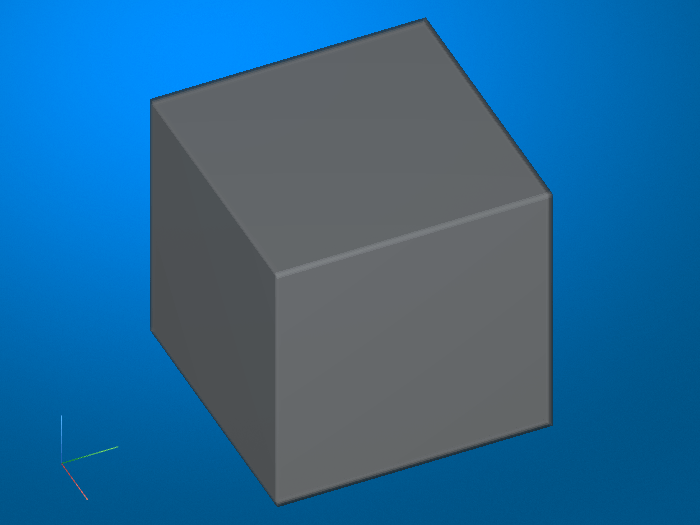
Create a sample volume.
volumeCube = 0.5*ones(100,100,100);
Create a 3-D viewer to control the appearance of the scene. Set the camera position of the scene to improve the visibility of the volume.
viewer = viewer3d(CameraPosition=[700 -250 650],CameraTarget=[50 50 50]);
Display the volume in the scene.
volshow(volumeCube,Parent=viewer);
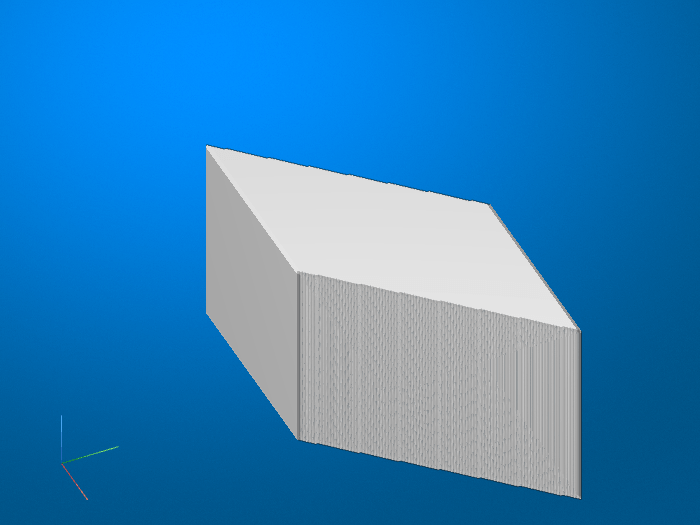
Create a 3-D affine transformation that shears 3-D volumes. The randomAffine3d function picks a shear amount randomly from a continuous uniform distribution within the interval [40, 60] degrees. randomAffine3d picks a random shear direction aligned with the x-, y-, or z-axis.
tform1 = randomAffine3d(Shear=[40 60]); J1 = imwarp(volumeCube,tform1);
Display the sheared volume in a new scene with the same camera position.
viewer1 = viewer3d(CameraPosition=[700 -250 650],CameraTarget=[50 50 50]); volshow(J1,Parent=viewer1);
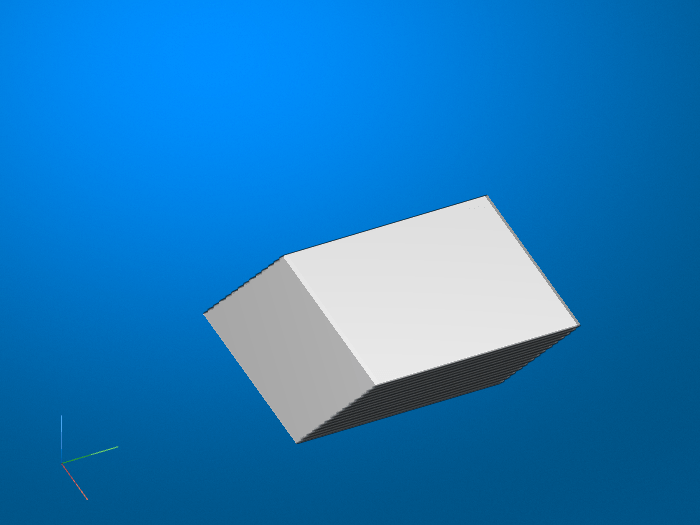
To shear a volume by a different randomly selected amount, create a new 3-D affine transformation. Note the difference in the shear direction.
tform2 = randomAffine3d(Shear=[40 60]); J2 = imwarp(volumeCube,tform2);
Display the sheared volume in a new scene with the same camera position.
viewer2 = viewer3d(CameraPosition=[700 -250 650],CameraTarget=[50 50 50]); volshow(J2,Parent=viewer2);