edge
Find edges in 2-D grayscale image
Syntax
Description
BW = edge(I,method,threshold,direction)method
is "Sobel", "Prewitt", or
"Roberts".
[
also returns the directional gradients. For the Sobel and Prewitt methods,
BW,threshOut,Gx,Gy]
= edge(___)Gx and Gy correspond to the
horizontal and vertical gradients, respectively. For the Roberts methods,
Gx and Gy correspond to the
gradient at angles of 135° and 45° from horizontal, respectively. This syntax is
valid only when method is "Sobel",
"Prewitt", or "Roberts".
Examples
Read a grayscale image into the workspace and display it.
I = imread('circuit.tif');
imshow(I)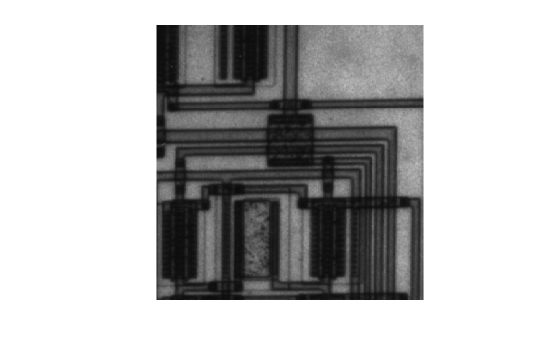
Find edges using the Canny method.
BW1 = edge(I,'Canny');Find edges using the Prewitt method.
BW2 = edge(I,'Prewitt');Display both results side-by-side.
imshowpair(BW1,BW2,'montage')
Input Arguments
Output Arguments
References
[1] Canny, John, "A Computational Approach to Edge Detection," IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. PAMI-8, No. 6, 1986, pp. 679-698.
[2] Lim, Jae S., Two-Dimensional Signal and Image Processing, Englewood Cliffs, NJ, Prentice Hall, 1990, pp. 478-488.
[3] Parker, James R., Algorithms for Image Processing and Computer Vision, New York, John Wiley & Sons, Inc., 1997, pp. 23-29.
Extended Capabilities
Version History
Introduced before R2006aSee Also
edge3 | fspecial | imgradient | imgradientxy