idNeuralStateSpace
Description
Use idNeuralStateSpace to create a black-box continuous-time or
discrete-time neural state-space model with identifiable (estimable) network weights and bias.
You can use the trained black-box model for control, estimation, optimization, and reduced
order modeling.
Continuous-time neural state-space models have the following general form,
where the state function F and the nontrivial output function H are approximated by neural networks. Because you need to measure all the states to properly train the state function, the states measurements are considered to be part of the output function. Here, e1 and e2 are measurement noises in the data sets which are minimized by the network training algorithm.
For discrete-time state-space systems, the state and output functions have this form.
For more information on neural state-space models, see What Are Neural State-Space Models?.
Creation
Description
nss = idNeuralStateSpace(nx)nx state variables and output identical to
state.
nss = idNeuralStateSpace(___,Name=Value)
For example, nss =
idNeuralStateSpace(3,NumInputs=2,NumOutputs=4,Ts=0.1) creates a
time-invariant discrete-time neural state-space object with 3 states,
2 inputs, four outputs (the first three are state measurements),
and sample time 0.1. The system is also time invariant (both state
and output functions do not explicitly depend on time) and does not have direct
feed-through (the input does not have immediate impact on output).
Input Arguments
Name-Value Arguments
Properties
State function network, specified as a dlnetwork (Deep Learning Toolbox) object. This network
approximates the state function of the state-space system (F). For
continuous state-space systems the state function returns the system state derivative
with respect to time, while for discrete-time state-space systems it returns the next
state. The inputs of the function are time (if IsTimeInvariant is
false), the current state, and the current input (if
NumInputs is positive), in that order.
When an idNeuralStateSpace model is constructed, a default state
network is created. It is a multi-layer perceptron (MLP) network with the following features:
Two hidden layers: each is a fully-connected layer with 64 nodes.
Two activation layers: each featuring a hyperbolic tangent (tanh) function.
One output layer: a fully-connected layer with
nxnodes.
To change the default network configuration, use createMLPNetwork. For
example:
nss.StateNetwork = createMLPNetwork(nss,"state",... LayerSizes=[64 64 64],... Activations="sigmoid")
You can also directly assign a custom dlnetwork object as the state
function network when the sizes of the input layers are distinguishable. For
example:
nss.StateNetwork = dlnet;
dlnet is a custom dlnetwork object with the
configuration as mentioned under the dlnet argument in setNetwork.For more information on custom networks and how to assign them to an
idNeuralStateSpace object when the input layer sizes are not
distinguishable, see setNetwork.
To train both state and output networks, use nlssest. For
example:
options1 = nssTrainingOptions("adam");
nss = nlssest(U, Y, nss, options1);
Note
To train the network, use
nlssestwhich updates the weights and biases of the network. After training completes, the network weights and biases are said to be "trained".A new training starts with the previously trained network. To reset the network, you can either manually assign the learnables of the
dlnetworkobject or initialize it.Multi-layer perceptron (MLP) networks with at least one hidden layer featuring squashing functions (such as hyperbolic tangent or sigmoid) are universal approximators, that is, are theoretically capable of approximating any function to any desired degree of accuracy provided that sufficiently many hidden units are available.
Deeper networks (networks with more hidden layers) can approximate compositional functions as well as shallow networks but with exponentially lower number of training parameters and sample complexity.
Output function networks, specified as a 2-by-1 array of dlnetwork (Deep Learning Toolbox) objects. The first network
represents the identity relation between y1
and x, since all the states are measured. This network has no
learnable parameters, is fixed, and cannot be changed or trained.
The second network approximates the output function H of the
state-space system, which is a function of time (if IsTimeInvariant
is false), the current state, and the current input (if
NumInputs is positive and HasFeedthrough is
true), in that order.
When you create an idNeuralStateSpace model, the default network
created to approximate H is a multi-layer perceptron (MLP) network
with the following features:
Two hidden layers: each is a fully-connected layer with 64 nodes.
Two activation layers: each featuring a hyperbolic tangent (tanh) function.
One output layer: a fully-connected layer with
NumOutputs-nxnodes.
To change the default network configuration, use createMLPNetwork. For
example:
nss.OutputNetwork = createMLPNetwork(nss,"output",... LayerSizes=[64 64 64],... Activations="sigmoid")
You can also directly assign a custom dlnetwork object as the
output function network when the sizes of the input layers are distinguishable. For
example:
nss.OutputNetwork = dlnet;
dlnet is a custom dlnetwork object with the
configuration as mentioned under the dlnet argument in setNetwork.For more information on custom networks and how to assign them to an
idNeuralStateSpace object when the input layer sizes are not
distinguishable, see setNetwork.
To train both state and output networks, use nlssest. For
example:
options1 = nssTrainingOptions("adam") options2 = nssTrainingOptions("sgdm") nss = nlssest(U, Y, nss, [options1; options2])
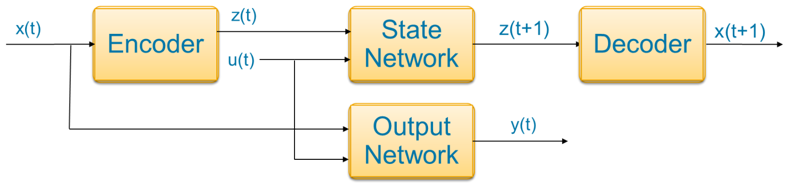
Encoder function network, specified as a dlnetwork (Deep Learning Toolbox) object. The encoder maps the
state to a latent state (usually, of a lower dimension), which is the input to the state
function network. The dimension of this latent state is specified by LatentDim.
The default value is [], which means that you are not using the
encoder. You add an encoder to your model by changing the default value of
LatentDim. This encoder network, by default contains two layers
of size 64 with tanh as the activation function.
To change the default encoder network configuration, use createMLPNetwork. For
example:
nss.Encoder = createMLPNetwork(nss,"encoder",... LayerSizes=[4 4],... Activations="sigmoid")
You can also directly assign a custom dlnetwork object as the
encoder function network. For
example:
nss.Encoder = dlnet;
dlnet is a custom dlnetwork object with one input
representing the original state and one output representing the latent state.For more information on autoencoders, see What Are Neural State-Space Models?
Decoder function network, specified as a dlnetwork (Deep Learning Toolbox) object. The output of the
state function network is the input of the decoder. The decoder maps the latent state
back to the original state. The dimension of the latent state is specified by LatentDim.
The default value is [], which means that you are not using the
decoder. You add a decoder to your model by changing the default value of
LatentDim. This decoder network, by default, contains two layers
of size 64 with tanh as the activation function.
To change the default decoder network configuration, use createMLPNetwork. For
example:
nss.Decoder = createMLPNetwork(nss,"decoder",... LayerSizes=[4 4],... Activations="sigmoid")
You can also directly assign a custom dlnetwork object as the
decoder function network. For
example:
nss.Decoder = dlnet;
dlnet is a custom dlnetwork object with one input
representing the latent state and one output representing the original state.For more information on autoencoders, see What Are Neural State-Space Models?
Dimension of the internal (latent) state, specified as NaN or a
positive integer. To add an encoder or decoder to your model, specify
LatentDim as a positive integer.
LatentDim Value | Model Framework |
|---|---|
NaN |
|
| A finite positive scalar |
|

Example: 2
Flag indicating time invariance, returned as one of the following:
true— (default), the system is time invariant, neither the state function F of the output function H depend explicitly on time.false— the system is time varying, both the state of the output function depend explicitly on time.
This property is read-only and cannot be set using dot notation. You can only
specify this properly when you create nss. To do so, use the
corresponding name-value pair argument in idNeuralStateSpace. For
example:
nss = idNeuralStateSpace(3,NumInputs=2,IsTimeInvariant=false)
Flag indicating direct feedthrough in the output networks, returned as
false or as an array logical values.
If NumOutputs = nx,
FeedthroughInOutputNetwork is false, because
the only output is the measured state, and there is no contribution from any
input.
If NumOutputs > nx,
FeedthroughInOutputNetwork is a 1-by-2 logical array in which the
elements are as follows.
The first logical value corresponds to y1 and is always false.
The second value corresponds to y2 and is the same value that you specify with the name-value pair argument
HasFeedThroughwhen you create the object. When this value is true, then y2 is an explicit function of the input, otherwise, as default, there is no explicit contribution from the input to y2.
Note
This property is read-only and you can change it only when you create
nss, using the HasFeedThrough argument in
idNeuralStateSpace.
Example: [false, false]
State names, specified as one of these values:
Character vector — For first-order models
Cell array of character vectors — For models with two or more states
''— For unnamed states
You can specify StateName using a string, such as
"velocity", but the state name is stored as a character vector,
'velocity'.
Example:
{'velocity','distance'}
State units, specified as:
A character vector or string — For first-order models
A cell array of character vectors or string array — For models with two or more states
''— For states without specified units
Use StateUnit to keep track of the units each state is expressed in. StateUnit has no effect on system behavior.
If you specify StateUnit using a string, such as
"mph", the state units are stored as a character
vector, 'mph'.
Example: 'mph'
Example: {'rpm','rad/s'}
Independent variable name, specified as a string or character vector, for the state, input and output functions.
Example: "t"
Innovation covariance matrix, specified as an
NumOutputs-by-NumOutputs positive
semi-definite matrix. Typically this property is automatically set by the estimation
algorithm.
Example: 1e-3*eye(2)
Names of input channels, specified as:
A character vector or string — For single-input models
A cell array of character vectors or a string array — For models with two or more inputs
''— For inputs without specified names
You can use automatic vector expansion to assign input names for multi-input models. For
example, if sys is a two-input model, you can specify
InputName as follows.
sys.InputName = 'controls';The input names automatically expand to {'controls(1)';'controls(2)'}.
You can use the shorthand notation u to refer to the InputName property. For example, sys.u is equivalent to sys.InputName.
Input channel names have several uses, including:
Identifying channels on model display and plots
Extracting subsystems of MIMO systems
Specifying connection points when interconnecting models
If you specify InputName using a string or string array, such as
"voltage", the input name is stored as a character vector,
'voltage'.
When you estimate a model using an iddata object, data, the software automatically sets InputName to data.InputName.
Units of input signals, specified as:
A character vector or string — For single-input models
A cell array of character vectors or string array — For models with two or more inputs
''— For inputs without specified units
Use InputUnit to keep track of the units each input signal is expressed in. InputUnit has no effect on system behavior.
If you specify InputUnit using a string, such as
"voltage", the input units are
stored as a character vector,
'voltage'.
Example: 'voltage'
Example: {'voltage','rpm'}
Input channel groups, specified as a structure where the fields are the group names and the values are the indices of the input channels belonging to the corresponding group. When you use InputGroup to assign the input channels of MIMO systems to groups, you can refer to each group by name when you need to access it. For example, suppose you have a five-input model sys, where the first three inputs are control inputs and the remaining two inputs represent noise. Assign the control and noise inputs of sys to separate groups.
sys.InputGroup.controls = [1:3]; sys.InputGroup.noise = [4 5];
Use the group name to extract the subsystem from the control inputs to all outputs.
sys(:,'controls')Example: struct('controls',[1:3],'noise',[4 5])
Names of output channels, specified as:
A character vector or string— For single-output models
A cell array of character vectors or string array — For models with two or more outputs
''— For outputs without specified names
You can use automatic vector expansion to assign output names for multi-output models. For
example, if sys is a two-output model, you can specify
OutputName as follows.
sys.OutputName = 'measurements';The output names automatically expand to {'measurements(1)';'measurements(2)'}.
You can use the shorthand notation y to refer to the OutputName property. For example, sys.y is equivalent to sys.OutputName.
Output channel names have several uses, including:
Identifying channels on model display and plots
Extracting subsystems of MIMO systems
Specifying connection points when interconnecting models
If you specify OutputName using a string, such as
"rpm", the output name is
stored as a character vector,
'rpm'.
When you estimate a model using an iddata object, data, the software automatically sets OutputName to data.OutputName.
Units of output signals, specified as:
A character vector or string — For single-output models
A cell array of character vectors or string array — For models with two or more outputs
''— For outputs without specified units
Use OutputUnit to keep track of the units each output signal is expressed in. OutputUnit has no effect on system behavior.
If you specify OutputUnit using a string, such as
"voltage", the output units are stored as a character vector,
'voltage'.
Example: 'voltage'
Example: {'voltage','rpm'}
Output channel groups, specified as a structure where the fields are the group names and the values are the indices of the output channels belonging to the corresponding group. When you use OutputGroup to assign the output channels of MIMO systems to groups, you can refer to each group by name when you need to access it. For example, suppose you have a four-output model sys, where the second output is a temperature, and the rest are state measurements. Assign these outputs to separate groups.
sys.OutputGroup.temperature = [2]; sys.OutputGroup.measurements = [1 3 4];
Use the group name to extract the subsystem from all inputs to the measurement outputs.
sys('measurements',:)Example: struct('temperature',[2],'measurement',[1 3 4])
Text notes about the model, specified as a string or character vector. The property stores
whichever of these two data types you provide. For instance, suppose that
sys1 and sys2 are dynamic system models. You
can set their Notes properties to a string and a character vector,
respectively.
sys1.Notes = "sys1 has a string."; sys2.Notes = 'sys2 has a character vector.'; sys1.Notes sys2.Notes
ans =
"sys1 has a string."
ans =
'sys2 has a character vector.'
You can also specify Notes as string array or a cell array of
character vectors or strings.
Data of any kind that you want to associate and store with the model, specified as any MATLAB® data type.
Sample time, specified as a nonnegative scalar, in units specified by the
TimeUnit property. For a continuous time model,
Ts is equal to 0 (default). Changing the value of Ts has no impact
on the system data and does not discretize or resample the model.
Note
If you change Ts to a different value after networks are
trained, you need to train the networks again because the original trained networks
are no longer valid.
Example: 0.1
Model time units, specified as:
'nanoseconds''microseconds''milliseconds''seconds''minutes''hours''days''weeks''months''years'
If you specify TimeUnit using a string, such as
"hours", the time units are stored as a character vector,
'hours'.
Model properties such as sample time Ts,
InputDelay, OutputDelay, and other time
delays are expressed in the units specified by TimeUnit. Changing
this property has no effect on other properties, and therefore changes the overall
system behavior. Use chgTimeUnit to
convert between time units without modifying system behavior.
This property is read-only.
Summary report that contains information about the estimation options and results
for a state-space model obtained using estimation commands. Use
Report to find estimation information for the identified model,
including the:
Status (estimated or constructed)
Estimation method
Estimation options
Search termination conditions
Estimation data fit and other quality metrics
For more information on this property and how to use it, see the Output Arguments section of the corresponding estimation command reference page and Estimation Report.
Object Functions
createMLPNetwork | Create and initialize a Multi-Layer Perceptron (MLP) network to be used within a neural state-space system |
setNetwork | Assign dlnetwork object as the state or output function of a
neural state-space model |
generateMATLABFunction | Generate MATLAB functions that evaluate the state and output functions, and their Jacobians, of a nonlinear grey-box or neural state-space model |
sim | Simulate response of identified model |
idNeuralStateSpace/evaluate | Evaluate a neural state-space system for a given set of state and input values and return state derivative (or next state) and output values |
idNeuralStateSpace/linearize | Linearize a neural state-space model around an operating point |
Examples
References
[1] Chen, Ricky T. Q., Yulia Rubanova, Jesse Bettencourt, and David Duvenaud. “Neural Ordinary Differential Equations.” arXiv, December 13, 2019. http://arxiv.org/abs/1806.07366.
Version History
Introduced in R2022b
See Also
Objects
Functions
createMLPNetwork|setNetwork|nssTrainingOptions|nlssest|generateMATLABFunction|idNeuralStateSpace/evaluate|idNeuralStateSpace/linearize|sim
Blocks
Live Editor Tasks
Topics
- What Are Neural State-Space Models?
- Estimate Neural State-Space System
- Estimate Nonlinear Autonomous Neural State-Space System
- Neural State-Space Model of Simple Pendulum System
- Reduced Order Modeling of a Nonlinear Dynamical System Using Neural State-Space Model with Autoencoder
- Augment Known Linear Model with Flexible Nonlinear Functions