idDeadZone
Create a dead-zone nonlinearity estimator object
Description
idDeadZone is an object that stores the dead-zone
nonlinearity estimator for estimating Hammerstein-Wiener models.
Use idDeadZone to define a nonlinear function , where y and x are scalars, and
θ represents the parameters a and
b, which define the zero interval.
The dead-zone nonlinearity function has the following characteristics:
For example, in the following plot, the dead-zone is in the interval
[-4,4].
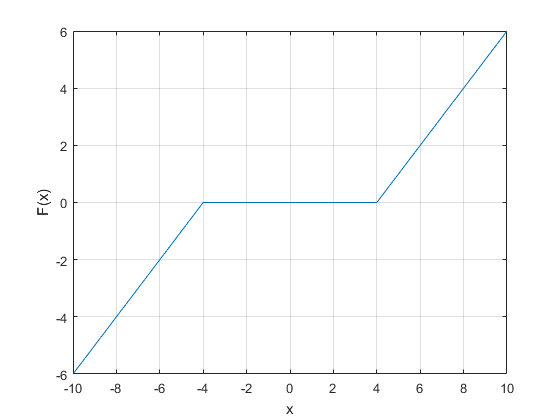
The value F(x) is computed by evaluate(NL,x), where
NL is the idDeadZone object.
For idDeadZone object properties, see Properties.
Creation
Description
NL = idDeadZone[NaN NaN]. The
initial value of the zero interval is determined from the estimation data range, during
estimation using nlhw. Use dot notation to customize the object
properties, if needed.
NL = idDeadZone('ZeroInterval',[a,b])[a,b].
Alternatively, use NL = idDeadZone([a,b]).
Properties
Examples
NL = idDeadZone;
Specify the zero interval.
NL.ZeroInterval = [-4,5];
Load estimation data.
load twotankdata; z = iddata(y,u,0.2,'Name','Two tank system'); z1 = z(1:1000);
Create an idDeadZone object, and specify the initial guess for the zero-interval.
OutputNL = idDeadZone('ZeroInterval',[-0.1 0.1]);Estimate model with no input nonlinearity.
m = nlhw(z1,[2 3 0],[],OutputNL);
Load the estimation data.
load motorizedcamera;Create an iddata object.
z = iddata(y,u,0.02,'Name','Motorized Camera','TimeUnit','s');
z is an iddata object with six inputs and two outputs.
Specify the model orders and delays.
Orders = [ones(2,6),ones(2,6),ones(2,6)];
Specify the same nonlinearity estimator for each input channel.
InputNL = idWaveletNetwork;
Specify different nonlinearity estimators for each output channel.
OutputNL = [idDeadZone,idWaveletNetwork];
Estimate the Hammerstein-Wiener model.
sys = nlhw(z,Orders,InputNL,OutputNL);
To see the shape of the estimated input and output nonlinearities, plot the nonlinearities.
plot(sys)

Click on the input and output nonlinearity blocks on the top of the plot to see the nonlinearities.