Double-Acting Actuator (G)

Libraries:
Simscape /
Fluids /
Gas /
Actuators
Description
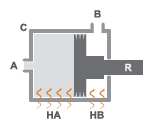
The Double-Acting Actuator (G) block models a linear actuator with a piston controlled by two opposing gas chambers. The actuator generates force in the extension and retraction strokes. The generated force depends on the pressure difference between the two chambers.
The figure shows the key components of the actuator. Ports A and B represent the gas chamber inlets. Port R represents the translating actuator piston and port C represents the actuator case. Ports HA and HB represent the thermal interfaces between each gas chamber and the environment. The moving piston is adiabatic.
This diagram shows the block behavior when Mechanical orientation
is Pressure at A causes positive displacement of R relative to
C.
Displacement
The block measures the piston displacement as the position at port R
relative to port C. The Mechanical
orientation parameter identifies the direction of piston
displacement. The piston displacement is neutral, or 0, when the
chamber A volume is equal to the value of the Dead volume in chamber
A parameter. When the Piston displacement from chamber A
cap parameter is Provide input signal from Multibody
joint, you input the piston displacement using port
p. Ensure that the derivative of the position signal is
equal to the piston velocity. You can ensure that the derivative of the position
signal is equal to the piston velocity by using a Translational Multibody Interface block to
provide the piston displacement.
The direction of the piston motion depends on the Mechanical orientation parameter. If the mechanical orientation is positive, then the piston translation is positive in relation to the actuator case when the gauge pressure at port A is positive. The direction of motion reverses when the mechanical orientation is negative.
Hard Stop
A set of hard stops limit the piston range of motion. The block uses an implementation of the Translational Hard Stop block, which treats hard stops like spring-damper systems. The spring stiffness coefficient controls the restorative component of the hard-stop contact force and the damping coefficient the dissipative component.
The hard stops are located at the distal ends of the piston stroke. If the mechanical orientation is positive, then the lower hard stop is at x = 0, and the upper hard stop is at x = +stroke. If the mechanical orientation is negative, then the lower hard stop is at x = -stroke, and the upper hard stop is at x = 0.
Block Composite
This block is a composite component based on these Simscape™ Foundation blocks:
