Train and Deploy Fully Convolutional Networks for Semantic Segmentation
This example shows how to train and deploy a fully convolutional semantic segmentation network on an NVIDIA® GPU by using GPU Coder™.
A semantic segmentation network classifies every pixel in an image, resulting in an image that is segmented by class. Applications for semantic segmentation include road segmentation for autonomous driving and cancer cell segmentation for medical diagnosis. To learn more, see Getting Started with Semantic Segmentation Using Deep Learning (Computer Vision Toolbox).
To illustrate the training procedure, this example trains FCN-8s [1], one type of convolutional neural network (CNN) designed for semantic image segmentation. Other types of networks for semantic segmentation include fully convolutional networks, such as SegNet and U-Net. You can apply this training procedure to those networks too.
This example uses the CamVid dataset [2] from the University of Cambridge for training. This data set is a collection of images containing street-level views obtained while driving. The data set provides pixel-level labels for 32 semantic classes including car, pedestrian, and road.
Third-Party Prerequisites
Required
CUDA® enabled NVIDIA GPU and compatible driver.
Optional
NVIDIA CUDA toolkit.
NVIDIA cuDNN library.
Environment variables for the compilers and libraries. For information on the supported versions of the compilers and libraries, see Third-Party Hardware. For setting up the environment variables, see Setting Up the Prerequisite Products.
Verify GPU Environment
Use the coder.checkGpuInstall function to verify that the compilers and libraries necessary for running this example are set up correctly.
envCfg = coder.gpuEnvConfig("host"); envCfg.DeepLibTarget = "cudnn"; envCfg.DeepCodegen = 1; envCfg.Quiet = 1; coder.checkGpuInstall(envCfg);
Setup
This example creates the fully convolutional semantic segmentation network with weights initialized from the VGG-16 network. The vgg16 function checks for the existence of the Deep Learning Toolbox™ Model for VGG-16 Network support package and returns a pretrained VGG-16 model.
vgg16();
Download a pretrained version of FCN. This pretrained model enables you to run the entire example without waiting for the training to complete. The doTraining flag controls whether the example uses the trained network of the example or the pretrained FCN network for code generation.
doTraining = false; if ~doTraining pretrainedURL = "https://www.mathworks.com/supportfiles" + ... "/gpucoder/cnn_models/fcn/FCN8sCamVid.mat"; disp("Downloading pretrained FCN (448 MB)..."); websave("FCN8sCamVid.mat",pretrainedURL); end
Downloading pretrained FCN (448 MB)...
Download CamVid Dataset
Download the CamVid dataset from these URLs.
imageURL = "http://web4.cs.ucl.ac.uk/staff/g.brostow/" + ... "MotionSegRecData/files/701_StillsRaw_full.zip"; labelURL = "http://web4.cs.ucl.ac.uk/staff/g.brostow/" + ... "MotionSegRecData/data/LabeledApproved_full.zip"; outputFolder = fullfile(pwd,"CamVid"); if ~exist(outputFolder, "dir") mkdir(outputFolder) labelsZip = fullfile(outputFolder,"labels.zip"); imagesZip = fullfile(outputFolder,"images.zip"); disp("Downloading 16 MB CamVid dataset labels..."); websave(labelsZip, labelURL); unzip(labelsZip, fullfile(outputFolder,"labels")); disp("Downloading 557 MB CamVid dataset images..."); websave(imagesZip, imageURL); unzip(imagesZip, fullfile(outputFolder,"images")); end
The data download time depends on your internet connection. The example execution does not proceed until the download operation is complete. Alternatively, use your web browser to first download the data set to your local disk. Then, use the outputFolder variable to point to the location of the downloaded file.
Load CamVid Images
Use imageDatastore to load CamVid images. The imageDatastore enables you to efficiently load a large collection of images onto a disk.
imgDir = fullfile(outputFolder,"images","701_StillsRaw_full"); imds = imageDatastore(imgDir);
Display one of the images.
I = readimage(imds,25); I = histeq(I); imshow(I)

Load CamVid Pixel-Labeled Images
Use pixelLabelDatastore (Computer Vision Toolbox) to load CamVid pixel label image data. A pixelLabelDatastore encapsulates the pixel label data and the label ID to a class name mapping.
Following the training method described in the SegNet paper [3], group the 32 original classes in CamVid to 11 classes. Specify these classes.
classes = [
"Sky"
"Building"
"Pole"
"Road"
"Pavement"
"Tree"
"SignSymbol"
"Fence"
"Car"
"Pedestrian"
"Bicyclist"
];To reduce 32 classes into 11 classes, multiple classes from the original data set are grouped together. For example, "Car" is a combination of "Car", "SUVPickupTruck", "Truck_Bus", "Train", and "OtherMoving". Return the grouped label IDs by using the camvidPixelLabelIDs supporting function.
labelIDs = camvidPixelLabelIDs();
Use the classes and label IDs to create the pixelLabelDatastore.
labelDir = fullfile(outputFolder,"labels");
pxds = pixelLabelDatastore(labelDir,classes,labelIDs);Read and display one of the pixel-labeled images by overlaying it on top of an image.
C = readimage(pxds,25);
cmap = camvidColorMap;
B = labeloverlay(I,C,"ColorMap",cmap);
imshow(B)
pixelLabelColorbar(cmap,classes);
Areas with no color overlay do not have pixel labels and are not used during training.
Analyze Data Set Statistics
To see the distribution of class labels in the CamVid dataset, use countEachLabel (Computer Vision Toolbox). This function counts the number of pixels by class label.
tbl = countEachLabel(pxds)
tbl=11×3 table
Name PixelCount ImagePixelCount
______________ __________ _______________
{'Sky' } 7.6801e+07 4.8315e+08
{'Building' } 1.1737e+08 4.8315e+08
{'Pole' } 4.7987e+06 4.8315e+08
{'Road' } 1.4054e+08 4.8453e+08
{'Pavement' } 3.3614e+07 4.7209e+08
{'Tree' } 5.4259e+07 4.479e+08
{'SignSymbol'} 5.2242e+06 4.6863e+08
{'Fence' } 6.9211e+06 2.516e+08
{'Car' } 2.4437e+07 4.8315e+08
{'Pedestrian'} 3.4029e+06 4.4444e+08
{'Bicyclist' } 2.5912e+06 2.6196e+08
Visualize the pixel counts by class.
frequency = tbl.PixelCount/sum(tbl.PixelCount);
bar(1:numel(classes),frequency)
xticks(1:numel(classes))
xticklabels(tbl.Name)
xtickangle(45)
ylabel("Frequency")
Ideally, all classes have an equal number of observations. The classes in CamVid are imbalanced, which is a common issue in automotive data sets of street scenes. Such scenes have more sky, building, and road pixels than pedestrian and bicyclist pixels because sky, buildings, and roads cover more area in the image. If not handled correctly, this imbalance can be detrimental to the learning process because the learning is biased in favor of the dominant classes. Later on in this example, you use class weighting to handle this issue.
Resize CamVid Data
The images in the CamVid data set are 720-by-960. To reduce training time and memory usage, resize the images and pixel label images to 360-by-480 by using the resizeCamVidImages and resizeCamVidPixelLabels supporting functions.
imageFolder = fullfile(outputFolder,"imagesResized",filesep); imds = resizeCamVidImages(imds,imageFolder); labelFolder = fullfile(outputFolder,"labelsResized",filesep); pxds = resizeCamVidPixelLabels(pxds,labelFolder);
Prepare Training and Test Sets
SegNet is trained by using 60% of the images from the dataset. The rest of the images are used for testing. The following code randomly splits the image and pixel label data into a training set and a test set.
[imdsTrain,imdsTest,pxdsTrain,pxdsTest] = partitionCamVidData(imds ...
,pxds);The 60/40 split results in the following number of training and test images:
numTrainingImages = numel(imdsTrain.Files)
numTrainingImages = 421
numTestingImages = numel(imdsTest.Files)
numTestingImages = 280
Create Network
Use fcnLayers (Computer Vision Toolbox) to create fully convolutional network layers initialized by using VGG-16 weights. The fcnLayers function performs the network transformations to transfer the weights from VGG-16 and adds the additional layers required for semantic segmentation. The output of the fcnLayers function is a LayerGraph object representing FCN. A LayerGraph object encapsulates the network layers and the connections between the layers.
imageSize = [360 480]; numClasses = numel(classes); lgraph = fcnLayers(imageSize,numClasses);
The image size is selected based on the size of the images in the dataset. The number of classes is selected based on the classes in CamVid.
Balance Classes by Using Class Weighting
The classes in CamVid are not balanced. To improve training, you can use the pixel label counts computed earlier by the countEachLabel (Computer Vision Toolbox) function and calculate the median frequency class weights [3].
imageFreq = tbl.PixelCount ./ tbl.ImagePixelCount; classWeights = median(imageFreq) ./ imageFreq;
Specify the class weights by using a pixelClassificationLayer (Computer Vision Toolbox).
pxLayer = pixelClassificationLayer("Name","labels","Classes", ... tbl.Name,"ClassWeights",classWeights)
pxLayer =
PixelClassificationLayer with properties:
Name: 'labels'
Classes: [11×1 categorical]
ClassWeights: [11×1 double]
OutputSize: 'auto'
Hyperparameters
LossFunction: 'crossentropyex'
Update the SegNet network that has the new pixelClassificationLayer by removing the current pixelClassificationLayer and adding the new layer. The current pixelClassificationLayer is named pixelLabels. Remove it by using the removeLayers (Deep Learning Toolbox) function, add the new one by using the addLayers (Deep Learning Toolbox) function, and connect the new layer to the rest of the network by using the connectLayers (Deep Learning Toolbox) function.
lgraph = removeLayers(lgraph,"pixelLabels"); lgraph = addLayers(lgraph, pxLayer); lgraph = connectLayers(lgraph,"softmax","labels");
Select Training Options
The optimization algorithm for training is Adam, which is derived from adaptive moment estimation. Use the trainingOptions (Deep Learning Toolbox) function to specify the hyperparameters used for Adam.
options = trainingOptions("adam", ... "InitialLearnRate",1e-3, ... "MaxEpochs",100, ... "MiniBatchSize",4, ... "Shuffle","every-epoch", ... "CheckpointPath", tempdir, ... "VerboseFrequency",2);
A MiniBatchSize of four reduces memory usage while training. You can increase or decrease this value based on the amount of GPU memory in your system.
CheckpointPath is set to a temporary location. This name-value pair enables the saving of network checkpoints at the end of every training epoch. If training is interrupted due to a system failure or power outage, you can resume training from the saved checkpoint. Make sure that the location specified by CheckpointPath has enough space to store the network checkpoints.
Data Augmentation
Data augmentation is used to improve network accuracy by randomly transforming the original data during training. By using data augmentation, you can add more variety to the training data without increasing the number of labeled training samples. To apply the same random transformation to both image and pixel label data use datastore combine and transform. First, combine imdsTrain and pxdsTrain.
dsTrain = combine(imdsTrain, pxdsTrain);
Next, use datastore transform to apply the desired data augmentation defined in the supporting function augmentImageAndLabel. Here, random left/right reflection and random X/Y translation of +/- 10 pixels is used for data augmentation.
xTrans = [-10 10];
yTrans = [-10 10];
dsTrain = transform(dsTrain, @(data)augmentImageAndLabel(data, ...
xTrans,yTrans));Note that data augmentation is not applied to the test and validation data. Ideally, test and validation data should be representative of the original data and is left unmodified for unbiased evaluation.
Start Training
Start training using trainNetwork if the doTraining flag is true. Otherwise, load a pretrained network.
The training was verified on an NVIDIA Titan Xp with 12 GB of GPU memory. If your GPU has less memory, you might run out of memory. If you do not have enough memory in your system, try lowering the MiniBatchSize property in trainingOptions to 1. Training this network takes about 5 hours or longer depending on your GPU hardware.
doTraining = false; if doTraining [net, info] = trainNetwork(dsTrain,lgraph,options); save("FCN8sCamVid.mat","net"); end
Save the DAG network object as a MAT-file named FCN8sCamVid.mat. This MAT-file is used during code generation.
Perform MEX Code-generation
The fcn_predict function takes an image input and performs prediction on the image by using the deep learning network saved in FCN8sCamVid.mat file. The function loads the network object from FCN8sCamVid.mat into a persistent variable mynet and reuses the persistent object on subsequent prediction calls.
type("fcn_predict.m")function out = fcn_predict(in)
%#codegen
% Copyright 2018-2019 The MathWorks, Inc.
persistent mynet;
if isempty(mynet)
mynet = coder.loadDeepLearningNetwork('FCN8sCamVid.mat');
end
% pass in input
out = predict(mynet,in);
Generate a GPU Configuration object for MEX target setting target language to C++. Use the coder.DeepLearningConfig function to create a cuDNN deep learning configuration object and assign it to the DeepLearningConfig property of the GPU code configuration object. Run the codegen command specifying an input size 360-by-480by-3. This size corresponds to the input layer of FCN.
cfg = coder.gpuConfig("mex"); cfg.TargetLang = "C++"; cfg.DeepLearningConfig = coder.DeepLearningConfig("cudnn"); codegen -config cfg fcn_predict -args {ones(360,480,3,"uint8")} -report
Code generation successful: View report
Run Generated MEX
Load and display an input image.
im = imread("testImage.png");
imshow(im);
Run prediction by calling fcn_predict_mex on the input image.
predict_scores = fcn_predict_mex(im);
The predict_scores variable is a three-dimensional matrix having 11 channels corresponding to the pixel-wise prediction scores for every class. Compute the channel by using the maximum prediction score to get pixel-wise labels.
[~,argmax] = max(predict_scores,[],3);
Overlay the segmented labels on the input image and display the segmented region.
classes = [
"Sky"
"Building"
"Pole"
"Road"
"Pavement"
"Tree"
"SignSymbol"
"Fence"
"Car"
"Pedestrian"
"Bicyclist"
];
cmap = camvidColorMap();
SegmentedImage = labeloverlay(im,argmax,"ColorMap",cmap);
figure
imshow(SegmentedImage);
pixelLabelColorbar(cmap,classes);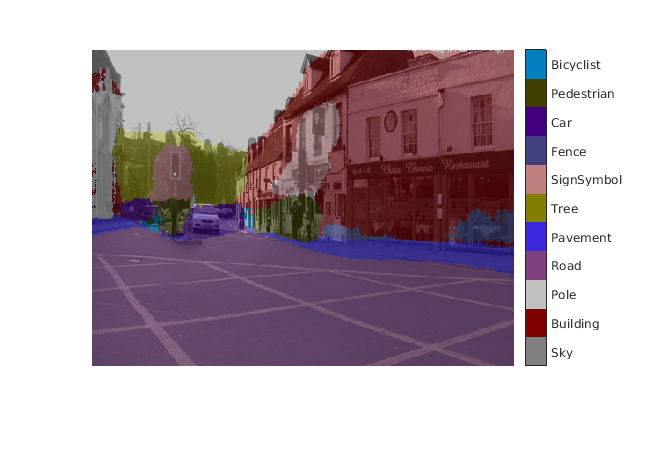
Supporting Functions
function data = augmentImageAndLabel(data, xTrans, yTrans) % Augment images and pixel label images using random reflection and % translation. for i = 1:size(data,1) tform = randomAffine2d(... "XReflection",true,... "XTranslation", xTrans, ... "YTranslation", yTrans); % Center the view at the center of image in the output space while % allowing translation to move the output image out of view. rout = affineOutputView(size(data{i,1}), tform, "BoundsStyle", ... "centerOutput"); % Warp the image and pixel labels using the same transform. data{i,1} = imwarp(data{i,1}, tform, "OutputView", rout); data{i,2} = imwarp(data{i,2}, tform, "OutputView", rout); end end
References
[1] Long, J., E. Shelhamer, and T. Darrell. "Fully Convolutional Networks for Semantic Segmentation." Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015, pp. 3431–3440.
[2] Brostow, G. J., J. Fauqueur, and R. Cipolla. "Semantic object classes in video: A high-definition ground truth database." Pattern Recognition Letters. Vol. 30, Issue 2, 2009, pp 88-97.
[3] Badrinarayanan, V., A. Kendall, and R. Cipolla. "SegNet: A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation." arXiv preprint arXiv:1511.00561, 2015.
See Also
Functions
Objects
coder.gpuConfig|coder.CodeConfig|coder.EmbeddedCodeConfig|coder.gpuEnvConfig|coder.CuDNNConfig
Related Examples
- Semantic Segmentation Using Deep Learning (Computer Vision Toolbox)
- Semantic Segmentation on NVIDIA DRIVE
- Code Generation for Semantic Segmentation Network
- Code Generation for Semantic Segmentation Network That Uses U-net
More About
- Getting Started with Semantic Segmentation Using Deep Learning (Computer Vision Toolbox)
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)