tilt
Syntax
Description
T = tilt(orientations)orientations. See Tilt Angle Definition for more details.
Examples
Input Arguments
Output Arguments
More About
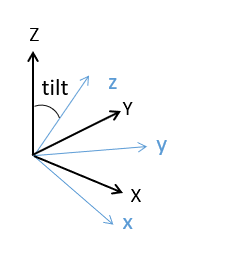
The tilt angle is defined as the angle between the positive-Z direction of the reference
frame and the positive-z direction of the body frame. The orientations
input defines the rotational coordinate transformation from the reference frame to the body
frame.
Extended Capabilities
Version History
Introduced in R2023b