ggiwphd
Gamma Gaussian Inverse Wishart (GGIW) PHD filter
Description
The ggiwphd object is a filter that implements the
probability hypothesis density (PHD) using a mixture of Gamma Gaussian Inverse-Wishart
components.
GGIW implementation of a PHD filter is typically used to track extended objects. An extended object can produce multiple detections per sensor, and the GGIW filter uses the random matrix model to account for the spatial distribution of these detections. The filter consists of three distributions to represent the state of an extended object.
Gaussian distribution — represents the kinematic state of the extended object.
Gamma distribution — represents the expected number of detections on a sensor from the extended object.
Inverse-Wishart (IW) distribution — represents the spatial extent of the target. In 2-D space, the extent is represented by a 2-by-2 random positive definite matrix, which corresponds to a 2-D ellipse description. In 3-D space, the extent is represented by a 3-by-3 random matrix, which corresponds to a 3-D ellipsoid description. The probability density of these random matrices is given as an Inverse-Wishart distribution.
For details about ggiwphd, see [1] and [2].
Note
ggiwphd object is not compatible with trackerGNN,
trackerJPDA, and trackerTOMHT
system objects.
Creation
Syntax
Description
PHD = ggiwphdggiwphd filter with default property values.
PHD = ggiwphd(States,StateCovariances)States and
StateCovariances of the Gaussian distribution for each component in
the density. States and StateCovariances set the
properties of the same names.
phd = ggiwphd(States,StateCovariances,Name,Value)
Properties
Object Functions
append | Append two phd filter objects |
correct | Correct phd filter with detections |
correctUndetected | Correct phd filter with no detection hypothesis |
extractState | Extract target state estimates from the phd filter |
labeledDensity | Keep components with a given label ID |
likelihood | Log-likelihood of association between detection cells and components in the density |
merge | Merge components in the density of phd filter |
predict | Predict probability hypothesis density of phd filter |
prune | Prune the filter by removing selected components |
scale | Scale weights of components in the density |
clone | Create duplicate phd filter object |
Examples
Creating a ggiwphd filter with two 3-D constant velocity components. The initial states of the two components are [0;0;0;0;0;0] and [1;0;1;0;1;0], respectively. Both these components have position covariance equal to 1 and velocity covariance equal to 100. By default, ggiwphd creates a 3-D extent matrix for each component.
states = [zeros(6,1),[1;0;1;0;1;0]]; cov1 = diag([1 100 1 100 1 100]); covariances = cat(3,cov1,cov1); phd = ggiwphd(states,covariances,'StateTransitionFcn',@constvel,... 'StateTransitionJacobianFcn',@constveljac,... 'MeasurementFcn',@cvmeas,'MeasurementJacobianFcn',@cvmeasjac,... 'ProcessNoise',eye(3),'HasAdditiveProcessNoise',false,... 'PositionIndex',[1;3;5]);
Specify information about extent.
dofs = [21 30];
scaleMatrix1 = 13*diag([4.7 1.8 1.4].^2);
scaleMatrix2 = 22*diag([1.8 4.7 1.4].^2);
scaleMatrices = cat(3,scaleMatrix1,scaleMatrix2);
phd.DegreesOfFreedom = dofs;
phd.ScaleMatrices = scaleMatrices;
phd.ExtentRotationFcn = @(x,dT)eye(3); % No rotation during predictionPredict the filter 0.1 second ahead.
predict(phd,0.1);
Specify detections at 0.1 second. The filter receives 10 detections at the current scan.
detections = cell(10,1); rng(2018); % Reproducible results for i = 1:10 detections{i} = objectDetection(0.1,randi([0 1]) + randn(3,1)); end phd.Detections = detections;
Select two detection cells and calculate their likelihoods.
detectionIDs = false(10,2); detectionIDs([1 3 5 7 9],1) = true; detectionIDs([2 4 6 8 10],2) = true; lhood = likelihood(phd,detectionIDs)
lhood = 2×2
1.5575 -0.3183
0.1513 -0.7616
Correct the filter with the two detection cells and associated likelihoods.
correct(phd,detectionIDs, exp(lhood)./sum(exp(lhood),1)); phd
phd =
ggiwphd with properties:
States: [6×4 double]
StateCovariances: [6×6×4 double]
PositionIndex: [3×1 double]
StateTransitionFcn: @constvel
StateTransitionJacobianFcn: @constveljac
ProcessNoise: [3×3 double]
HasAdditiveProcessNoise: 0
Shapes: [6 6 6 6]
Rates: [2 2 2 2]
GammaForgettingFactors: [1 1 1 1]
DegreesOfFreedom: [25.9870 34.9780 25.9870 34.9780]
ScaleMatrices: [3×3×4 double]
ExtentRotationFcn: @(x,dT)eye(3)
TemporalDecay: 100
Weights: [0.8032 0.1968 0.6090 0.3910]
Labels: [0 0 0 0]
Detections: {1×10 cell}
MeasurementFcn: @cvmeas
MeasurementJacobianFcn: @cvmeasjac
HasAdditiveMeasurementNoise: 1
Merge components in the filter.
merge(phd,5); phd
phd =
ggiwphd with properties:
States: [6×2 double]
StateCovariances: [6×6×2 double]
PositionIndex: [3×1 double]
StateTransitionFcn: @constvel
StateTransitionJacobianFcn: @constveljac
ProcessNoise: [3×3 double]
HasAdditiveProcessNoise: 0
Shapes: [6 6.0000]
Rates: [2 2]
GammaForgettingFactors: [1 1]
DegreesOfFreedom: [25.9870 34.9780]
ScaleMatrices: [3×3×2 double]
ExtentRotationFcn: @(x,dT)eye(3)
TemporalDecay: 100
Weights: [1.4122 0.5878]
Labels: [0 0]
Detections: {1×10 cell}
MeasurementFcn: @cvmeas
MeasurementJacobianFcn: @cvmeasjac
HasAdditiveMeasurementNoise: 1
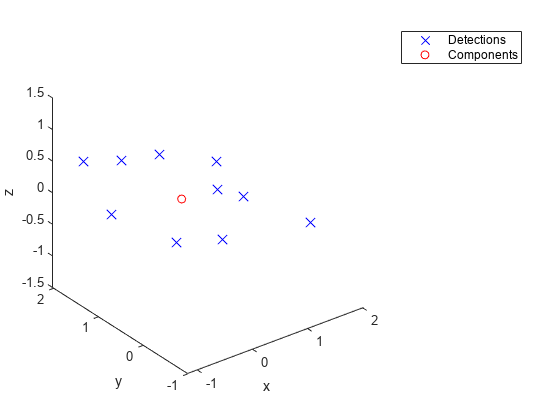
Extract state estimates and detections.
targetStates = extractState(phd,0.5); tStates = targetStates.State
tStates = 6×1
0.1947
0.9733
0.8319
4.1599
-0.0124
-0.0621
d = [detections{:}];
measurements = [d.Measurement];Visualize the results.
figure() plot3(measurements(1,:),measurements(2,:),measurements(3,:),'x','MarkerSize',10,'MarkerEdgeColor','b'); hold on; plot3( tStates(1,:),tStates(3,:),tStates(5,:),'ro'); xlabel('x') ylabel('y') zlabel('z') legend('Detections','Components')
References
[1] Granstorm, K., and O. Orguner." A PHD filter for tracking multiple extended targets using random matrices." IEEE Transactions on Signal Processing. Vol. 60, Number 11, 2012, pp. 5657-5671.
[2] Granstorm, K., and A. Natale, P. Braca, G. Ludeno, and F. Serafino."Gamma Gaussian inverse Wishart probability hypothesis density for extended target tracking using X-band marine radar data." IEEE Transactions on Geoscience and Remote Sensing. Vol. 53, Number 12, 2015, pp. 6617-6631.
Extended Capabilities
Version History
Introduced in R2019a
See Also
trackingSensorConfiguration | trackerPHD | partitionDetections | gmphd