dssm
Create diffuse linear Gaussian state-space model
Description
The dssm function returns a dssm object
specifying the functional form and storing the parameter values of a diffuse linear Gaussian state-space
model for a latent state process xt
possibly imperfectly observed through the variable
yt. The variables
xt and
yt can be univariate or multivariate and the model
parameters or variable dimensions can be time-invariant or time-varying (see Decide on Model Structure). A diffuse state-space model
contains diffuse states, and variances of the initial distributions of diffuse states are
Inf. All diffuse states are independent of each other and all other
states. Object functions of the
dssm object implement the diffuse Kalman filter for filtering,
smoothing, and parameter estimation.
The key components of a dssm object are the state-transition
A, state-disturbance-loading B,
measurement-sensitivity C, and observation-innovation D
coefficient matrices because they completely specify the model structure. You can explicitly
specify each matrix or supply a custom function that implicitly specifies them. Regardless,
given the model structure, all coefficients are unknown and estimable unless you specify their
values.
To estimate a model containing unknown parameter values, pass the model and data to
estimate. To work with an estimated or fully specified
dssm object, pass it to an object function.
Alternative state-space models include:
Creation
Syntax
Description
Explicitly Specify Coefficient Matrices
Mdl = dssm(A,B,C)Mdl with state-transition matrix A,
state-disturbance-loading matrix B, and measurement-sensitivity
matrix C. At each time t, the state combination
yt =
Cxt is observed without
error. dssm sets the model properties
A, B, and C from the
corresponding inputs.
Mdl = dssm(A,B,C,D)D and sets
the property D.
Mdl = dssm(___,Name=Value)dssm(A,B,C,StateType=[0; 1; 2]) specifies that the first state
variable is initially stationary, the second state variable is initially the constant 1,
and the third state variable is initially nonstationary.
Implicitly Specify Coefficient Matrices By Using Custom Function
Mdl = dssm(ParamMap)Mdl whose structure is
specified by the custom parameter-to-matrix mapping function
ParamMap. The function maps a parameter vector θ
to the matrices A, B, and
C. Optionally, ParamMap can map parameters
to D, Mean0, Cov0, or
StateType. To accommodate a regression component in the
observation equation, ParamMap can return deflated observation
data.
Convert from Diffuse to Standard State-Space Model
Mdl = dssm(SSMMdl)SSMMdl to a diffuse
state-space model object Mdl. dssm sets all
initial variances of diffuse states in Mdl.Cov0 to
Inf.
Because Mdl is a diffuse state-space model,
dssm object functions apply the diffuse Kalman filter,
instead of the standard Kalman filter, for filtering, smoothing, and parameter
estimation.
Input Arguments
Properties
Object Functions
Examples
Create a diffuse state-space model containing two independent states, and , and an observation, , that is the deterministic sum of the two states at time . is an AR(1) model with a constant and is a random walk. Symbolically, the state-space model is
The state disturbances, and , are standard Gaussian random variables.
Specify the state-transition matrix.
A = [NaN NaN 0; 0 1 0; 0 0 1];
The NaN values indicate unknown parameters.
Specify the state-disturbance-loading matrix.
B = [NaN 0; 0 0; 0 NaN];
Specify the measurement-sensitivity matrix.
C = [1 0 1];
Create a vector that specifies the state types. In this example:
is a stationary AR(1) model, so its state type is
0.is a placeholder for the constant in the AR(1) model. Because the constant is unknown and is expressed in the first equation, is
1for the entire series. Therefore, its state type is1.is a nonstationary, random walk with drift, so its state type is
2.
StateType = [0 1 2];
Create the state-space model using dssm.
Mdl = dssm(A,B,C,StateType=StateType)
Mdl =
State-space model type: dssm
State vector length: 3
Observation vector length: 1
State disturbance vector length: 2
Observation innovation vector length: 0
Sample size supported by model: Unlimited
Unknown parameters for estimation: 4
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
Unknown parameters: c1, c2,...
State equations:
x1(t) = (c1)x1(t-1) + (c2)x2(t-1) + (c3)u1(t)
x2(t) = x2(t-1)
x3(t) = x3(t-1) + (c4)u2(t)
Observation equation:
y1(t) = x1(t) + x3(t)
Initial state distribution:
Initial state means are not specified.
Initial state covariance matrix is not specified.
State types
x1 x2 x3
Stationary Constant Diffuse
Mdl is a dssm model object containing unknown parameters. A detailed summary of Mdl prints to the Command Window. If you do not specify the initial state covariance matrix, then the initial variance of is Inf.
It is good practice to verify that the state and observation equations are correct. If the equations are not correct, then expand the state-space equation and verify it manually.
Create a diffuse state-space model containing two random walk states. The observations are the sum of the two states, plus Gaussian error. Symbolically, the equation is
Define the state-transition matrix.
A = [1 0; 0 1];
Define the state-disturbance-loading matrix.
B = [NaN 0; 0 NaN];
Define the measurement-sensitivity matrix.
C = [1 1];
Define the observation-innovation matrix.
D = NaN;
Create a vector that specifies that both states are nonstationary.
StateType = [2; 2];
Create the state-space model using dssm.
Mdl = dssm(A,B,C,D,StateType=StateType)
Mdl =
State-space model type: dssm
State vector length: 2
Observation vector length: 1
State disturbance vector length: 2
Observation innovation vector length: 1
Sample size supported by model: Unlimited
Unknown parameters for estimation: 3
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
Unknown parameters: c1, c2,...
State equations:
x1(t) = x1(t-1) + (c1)u1(t)
x2(t) = x2(t-1) + (c2)u2(t)
Observation equation:
y1(t) = x1(t) + x2(t) + (c3)e1(t)
Initial state distribution:
Initial state means are not specified.
Initial state covariance matrix is not specified.
State types
x1 x2
Diffuse Diffuse
Mdl is an dssm model containing unknown parameters. A detailed summary of Mdl prints to the Command Window.
Pass the data and Mdl to estimate to estimate the parameters. During estimation, the initial state variances are Inf, and estimate implements the diffuse Kalman filter.
Create a diffuse state-space model, where:
The state is a stationary AR(2) model with , , and a constant 0.5. The state disturbance is a mean zero Gaussian random variable with standard deviation 0.3.
The state is a random walk. The state disturbance is a mean zero Gaussian random variable with standard deviation 0.05.
The observation is the difference between the current and previous value in the AR(2) state, plus a mean 0 Gaussian observation innovation with standard deviation 0.1.
The observation is the random walk state plus a mean 0 Gaussian observation innovation with standard deviation 0.02.
Symbolically, the state-space model is
The model has four states: is the AR(2) process, represents , is the AR(2) model constant, and is the random walk.
Define the state-transition matrix.
A = [0.6 0.2 0.5 0; 1 0 0 0; 0 0 1 0; 0 0 0 1];
Define the state-disturbance-loading matrix.
B = [0.3 0; 0 0; 0 0; 0 0.05];
Define the measurement-sensitivity matrix.
C = [1 -1 0 0; 0 0 0 1];
Define the observation-innovation matrix.
D = [0.1; 0.02];
Use dssm to create the state-space model. Identify the type of initial state distributions (StateType) by noting the following:
is a stationary AR(2) process.
is also a stationary AR(2) process.
is the constant 1 for all periods.
is nonstationary.
Set the initial state means to 0. The initial state mean for constant states must be 1.
mean0 = [0; 0; 1; 0]; stateType = [0; 0; 1; 2]; Mdl = dssm(A,B,C,D,Mean0=mean0,StateType=stateType)
Mdl =
State-space model type: dssm
State vector length: 4
Observation vector length: 2
State disturbance vector length: 2
Observation innovation vector length: 1
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equations:
x1(t) = (0.60)x1(t-1) + (0.20)x2(t-1) + (0.50)x3(t-1) + (0.30)u1(t)
x2(t) = x1(t-1)
x3(t) = x3(t-1)
x4(t) = x4(t-1) + (0.05)u2(t)
Observation equations:
y1(t) = x1(t) - x2(t) + (0.10)e1(t)
y2(t) = x4(t) + (0.02)e1(t)
Initial state distribution:
Initial state means
x1 x2 x3 x4
0 0 1 0
Initial state covariance matrix
x1 x2 x3 x4
x1 0.21 0.16 0 0
x2 0.16 0.21 0 0
x3 0 0 0 0
x4 0 0 0 Inf
State types
x1 x2 x3 x4
Stationary Stationary Constant Diffuse
Mdl is a dssm model object. dssm sets the initial state:
Covariance matrix for the stationary states to the asymptotic covariance of the AR(2) model
Variance for constant states to
0Variance for diffuse states to
Inf
You can display or modify properties of Mdl using dot notation. For example, display the initial state covariance matrix.
Mdl.Cov0
ans = 4×4
0.2143 0.1607 0 0
0.1607 0.2143 0 0
0 0 0 0
0 0 0 Inf
Reset the initial state means for the stationary states to their asymptotic values.
Mdl.Mean0(1:2) = 0.5/(1-0.2-0.6); Mdl.Mean0
ans = 4×1
2.5000
2.5000
1.0000
0
Use a parameter mapping function to create a time-invariant state-space model, where the state model is AR(1) model. The states are observed with bias, but without random error. Set the initial state mean and variance, and specify that the state is stationary.
Write a function that specifies how the parameters in params map to the state-space model matrices, the initial state values, and the type of state. Symbolically, the model is

% Copyright 2015 The MathWorks, Inc. function [A,B,C,D,Mean0,Cov0,StateType] = timeInvariantParamMap(params) % Time-invariant state-space model parameter mapping function example. This % function maps the vector params to the state-space matrices (A, B, C, and % D), the initial state value and the initial state variance (Mean0 and % Cov0), and the type of state (StateType). The state model is AR(1) % without observation error. varu1 = exp(params(2)); % Positive variance constraint A = params(1); B = sqrt(varu1); C = params(3); D = []; Mean0 = 0.5; Cov0 = 100; StateType = 0; end
Save this code as a file named timeInvariantParamMap.m to a folder on your MATLAB® path.
Create the state-space model by passing the function timeInvariantParamMap as a function handle to ssm.
Mdl = ssm(@timeInvariantParamMap);
ssm implicitly creates the state-space model. Usually, you cannot verify implicitly defined state-space models.
By default, ssm assigns a large scalar (1e7) to the initial state variance of all diffuse states in a standard state-space model. Using this specification, the software subsequently estimates, filters, and smooths a standard state-space model using the standard Kalman filter. A standard state-space model treatment is an approximation to results from an analysis that treats diffuse states using infinite variance. To implement the diffuse Kalman filter instead, convert the standard state-space model to a diffuse state-space model. This conversion attributes infinite variance to all diffuse states.
Explicitly create a two-dimensional standard state-space model. Specify that the first state equation is and that the second state equation is . Specify that the first observation equation is and that the second observation equation is . Specify that the states are diffuse and nonstationary, respectively.
A = [1 0; 0 0.2]; B = [1 0; 0 1]; C = [1 0;0 1]; D = [1 0; 0 1]; stateType = [2 0]; MdlSSM = ssm(A,B,C,D,StateType=stateType)
MdlSSM =
State-space model type: ssm
State vector length: 2
Observation vector length: 2
State disturbance vector length: 2
Observation innovation vector length: 2
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equations:
x1(t) = x1(t-1) + u1(t)
x2(t) = (0.20)x2(t-1) + u2(t)
Observation equations:
y1(t) = x1(t) + e1(t)
y2(t) = x2(t) + e2(t)
Initial state distribution:
Initial state means
x1 x2
0 0
Initial state covariance matrix
x1 x2
x1 1.00e+07 0
x2 0 1.04
State types
x1 x2
Diffuse Stationary
MdlSSM is an ssm model object. In some cases, ssm can detect the state type, but it is good practice to specify whether the state is stationary, diffuse, or the constant 1. Because the model does not contain any unknown parameters, ssm infers the initial state distributions.
Convert MdlSSM to a diffuse state-space model.
Mdl = dssm(MdlSSM)
Mdl =
State-space model type: dssm
State vector length: 2
Observation vector length: 2
State disturbance vector length: 2
Observation innovation vector length: 2
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equations:
x1(t) = x1(t-1) + u1(t)
x2(t) = (0.20)x2(t-1) + u2(t)
Observation equations:
y1(t) = x1(t) + e1(t)
y2(t) = x2(t) + e2(t)
Initial state distribution:
Initial state means
x1 x2
0 0
Initial state covariance matrix
x1 x2
x1 Inf 0
x2 0 1.04
State types
x1 x2
Diffuse Stationary
Mdl is a dssm model object. The structures of Mdl and MdlSSM are equivalent, except that the initial state variance of the state in Mdl is Inf rather than 1e7.
To see the difference between the two models, simulate 10 periods of data from a state-space model that is similar to MdlSSM. Set the initial state covariance matrix to .
Mdl0 = MdlSSM;
Mdl0.Cov0 = eye(2);
T = 10;
rng(1); % For reproducibility
y = simulate(Mdl0,T);Obtain filtered and smoothed states from Mdl and MdlSSM using the simulated data.
fY = filter(MdlSSM,y); fYD = filter(Mdl,y); sY = smooth(MdlSSM,y); sYD = smooth(Mdl,y);
Plot the filtered and smoothed states.
figure tiledlayout(2,1) nexttile plot(1:T,y(:,1),"-o",1:T,fY(:,1),"-d",1:T,fYD(:,1),"-*") title("Filter Estimates of x_{1,t}") nexttile plot(1:T,y(:,1),"-o",1:T,sY(:,1),"-d",1:T,sYD(:,1),"-*") title("Smooth Esimates of x_{1,t}") legend("Simulated data","State estimates, MdlSSM","State estimates, Mdl", ... Location="best")
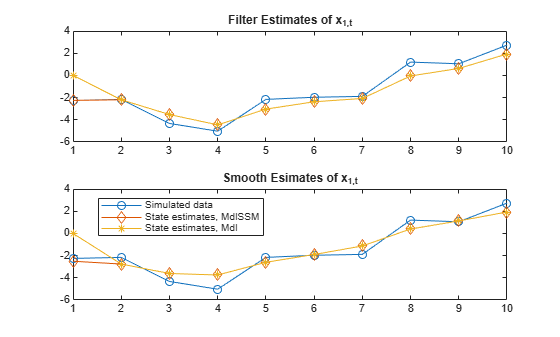
figure tiledlayout(2,1) nexttile plot(1:T,y(:,2),"-o",1:T,fY(:,2),"-d",1:T,fYD(:,2),"-*") title("Filtered States of x_{2,t}") nexttile plot(1:T,y(:,2),"-o",1:T,sY(:,2),"-d",1:T,sYD(:,2),"-*") title("Smoothed States of x_{2,t}") legend("Simulated data","State estimates, MdlSSM","State estimates, Mdl", ... Location="best")
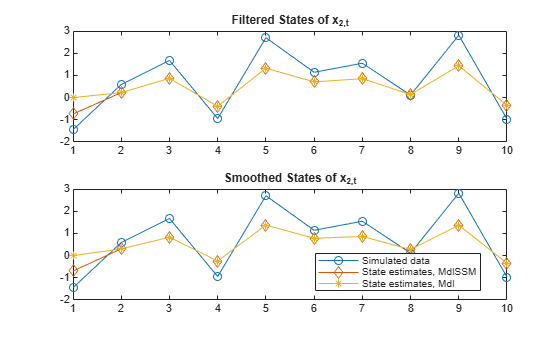
In addition to apparent transient behavior in the random walk, the filtered and smoothed states between the standard and diffuse state-space models appear nearly equivalent. The slight difference occurs because filter and smooth set all diffuse state estimates in the diffuse state-space model to 0 while they implement the diffuse Kalman filter. Once the covariance matrices of the smoothed states attain full rank, filter and smooth switch to using the standard Kalman filter. In this case, the switching time occurs after the first period.
More About
Tips
Specify
ParamMapin a more general or complex setting, where, for example:The initial state values are parameters.
In time-varying models, you want to use the same parameters for more than one period.
You want to impose parameter constraints.
You can create a
dssmmodel object that does not contain any diffuse states. However, subsequent computations, for example, filtering and parameter estimation, can be inefficient. If all states have stationary distributions or are the constant 1, create anssmmodel object instead.
Algorithms
Default values for
Mean0andCov0:If you explicitly specify the state-space model (that is, you provide the coefficient matrices
A,B,C, and optionallyD), then:For stationary states, the software generates the initial value using the stationary distribution. If you provide all values in the coefficient matrices (that is, your model has no unknown parameters), then
dssmgenerates the initial values. Otherwise, the software generates the initial values during estimation.For states that are always the constant 1,
dssmsetsMean0to 1 andCov0to0.For diffuse states, the software sets
Mean0to 0 andCov0toInfby default.
If you implicitly specify the state-space model (that is, you provide the parameter vector to the coefficient-matrices-mapping function
ParamMap), then the software generates the initial values during estimation.
For static states that do not equal 1 throughout the sample, the software cannot assign a value to the degenerate, initial state distribution. Therefore, set static states to
2using the name-value pair argumentStateType. Subsequently, the software treats static states as nonstationary and assigns the static state a diffuse initial distribution.It is best practice to set
StateTypefor each state. By default, the software generatesStateType, but this behavior might not be accurate. For example, the software cannot distinguish between a constant 1 state and a static state.The software cannot infer
StateTypefrom data because the data theoretically comes from the observation equation. The realizations of the state equation are unobservable.dssmmodels do not store observed responses or predictor data. Supply the data wherever necessary using the appropriate input or name-value pair arguments.Suppose that you want to create a diffuse state-space model using a parameter-to-matrix mapping function with this signature:
and you specify the model using an anonymous function[A,B,C,D,Mean0,Cov0,StateType,DeflateY] = paramMap(params,Y,Z)
The observed responsesMdl = dssm(@(params)paramMap(params,Y,Z))
Yand predictor dataZare not input arguments in the anonymous function. IfYandZexist in the MATLAB Workspace before you createMdl, then the software establishes a link to them. Otherwise, if you passMdltoestimate, the software throws an error.The link to the data established by the anonymous function overrides all other corresponding input argument values of
dssm. This distinction is important particularly when conducting a rolling window analysis. For details, see Rolling-Window Analysis of Time-Series Models.
Alternatives
Create an ssm model object instead of a dssm
model object when:
The model does not contain any diffuse states.
The diffuse states are correlated with each other or to other states.
You want to implement the standard Kalman filter.
References
Version History
Introduced in R2015b