autocorr
Sample autocorrelation
Syntax
Description
[
returns the sample autocorrelation function (ACF)
and associated lags of the input univariate time series.acf,lags] = autocorr(y)
ACFTbl = autocorr(Tbl)DataVariable name-value argument. (since R2022a)
[___, uses any input-argument combination in the previous
syntaxes, and returns the output-argument combination for the corresponding input
arguments and the approximate upper and lower confidence bounds on the ACF.bounds]
= autocorr(___)
[___] = autocorr(___,
uses additional options specified by one or more name-value arguments. For example,
Name=Value)autocorr(Tbl,DataVariable="RGDP",NumLags=10,NumSTD=1.96) returns 10
lags of the sample ACF of the table variable "RGDP" in
Tbl and 95% confidence bounds.
autocorr(___) plots the sample ACF of the input
series with confidence bounds.
autocorr(
plots on the axes specified by ax,___)ax instead of
the current axes (gca). ax can precede any of the input
argument combinations in the previous syntaxes.
[___, plots the sample ACF of the input series and
additionally returns handles to plotted graphics objects. Use elements of
h]
= autocorr(___)h to modify properties of the plot after you create it.
Examples
Compute the ACF of a univariate time series. Input the time series data as a numeric vector.
Load the quarterly real GDP series in Data_GDP.mat. Plot the series, which is stored in the numeric vector Data.
load Data_GDP
plot(Data)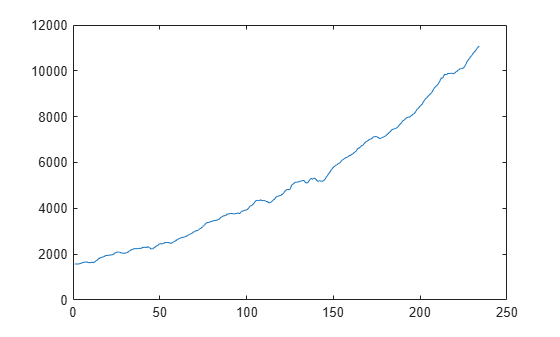
The series exhibits exponential growth.
Compute the returns of the series.
ret = price2ret(Data);
ret is a series of real GDP returns; it has one less observation than the real GDP series.
Compute the ACF of the real GDP returns, and return the associated lags.
[acf,lags] = autocorr(ret); [acf lags]
ans = 21×2
1.0000 0
0.3329 1.0000
0.1836 2.0000
-0.0216 3.0000
-0.1172 4.0000
-0.1632 5.0000
-0.0870 6.0000
-0.0707 7.0000
-0.0380 8.0000
0.0554 9.0000
0.0623 10.0000
0.0213 11.0000
-0.1475 12.0000
-0.1384 13.0000
-0.1021 14.0000
⋮
Let be the real GDP return at time . In general, acf(j) = Corr(,). Therefore, acf(1) = Corr(,) = 1.0000, acf(2) = Corr(,) = 0.3329, and so on.
Since R2022a
Compute the ACF of a time series, which is one variable in a table.
Load the electricity spot price data set Data_ElectricityPrices.mat, which contains the daily spot prices in the timetable DataTimeTable.
load Data_ElectricityPrices.mat
DataTimeTable.Properties.VariableNamesans = 1×1 cell array
{'SpotPrice'}
Plot the series.
plot(DataTimeTable.SpotPrice)
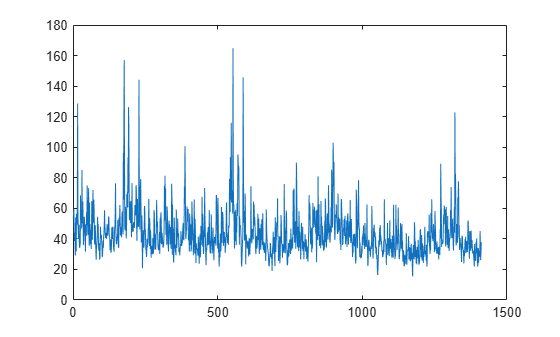
The time series plot does not clearly indicate an exponential trend or unit root.
Compute the ACF of the raw spot price series.
ACFTbl = autocorr(DataTimeTable)
ACFTbl=21×2 table
Lags ACF
____ _______
0 1
1 0.55405
2 0.38251
3 0.31713
4 0.25107
5 0.21436
6 0.21275
7 0.19396
8 0.18292
9 0.18826
10 0.19476
11 0.19043
12 0.19963
13 0.19397
14 0.19957
15 0.25495
⋮
autocorr returns the results in the table ACFTbl, where variables correspond to the ACF (ACF) and associated lags (Lags).
By default, autocorr computes the ACF of the last variable in the table. To select a variable from an input table, set the DataVariable option.
Since R2022a
Consider the electricity spot prices in Compute ACF of Table Variable.
Load the electricity spot price data set Data_ElectricityPrices.mat. Compute the ACF and return the ACF confidence bounds.
load Data_ElectricityPrices
[ACFTbl,bounds] = autocorr(DataTimeTable)ACFTbl=21×2 table
Lags ACF
____ _______
0 1
1 0.55405
2 0.38251
3 0.31713
4 0.25107
5 0.21436
6 0.21275
7 0.19396
8 0.18292
9 0.18826
10 0.19476
11 0.19043
12 0.19963
13 0.19397
14 0.19957
15 0.25495
⋮
bounds = 2×1
0.0532
-0.0532
Assuming the spot prices follow a Gaussian white noise series, an approximate 95.4% confidence interval on the ACF is (-0.0532, 0.0532).
Although various estimates of the sample autocorrelation function exist, autocorr uses the form in Box, Jenkins, and Reinsel, 1994. In their estimate, they scale the correlation at each lag by the sample variance (var(y,1)) so that the autocorrelation at lag 0 is unity. However, certain applications require rescaling the normalized ACF by another factor.
Simulate 1000 observations from the standard Gaussian distribution.
rng(1); % For reproducibility
y = randn(1000,1);Compute the normalized and unnormalized sample ACF.
[normalizedACF, lags] = autocorr(y,NumLags=10); unnormalizedACF = normalizedACF*var(y,1);
Compare the first 10 lags of the sample ACF with and without normalization.
[lags normalizedACF unnormalizedACF]
ans = 11×3
0 1.0000 0.9960
1.0000 -0.0180 -0.0180
2.0000 0.0536 0.0534
3.0000 -0.0206 -0.0205
4.0000 -0.0300 -0.0299
5.0000 -0.0086 -0.0086
6.0000 -0.0108 -0.0107
7.0000 -0.0116 -0.0116
8.0000 0.0309 0.0307
9.0000 0.0341 0.0340
10.0000 0.0076 0.0075
Specify the MA(2) model:
where is Gaussian with mean 0 and variance 1.
rng(1); % For reproducibility
Mdl = arima(MA={-0.5 0.4},Constant=0,Variance=1)Mdl =
arima with properties:
Description: "ARIMA(0,0,2) Model (Gaussian Distribution)"
SeriesName: "Y"
Distribution: Name = "Gaussian"
P: 0
D: 0
Q: 2
Constant: 0
AR: {}
SAR: {}
MA: {-0.5 0.4} at lags [1 2]
SMA: {}
Seasonality: 0
Beta: [1×0]
Variance: 1
Simulate 1000 observations from Mdl.
y = simulate(Mdl,1000);
Plot the ACF of the simulated series. Specify that the series is an MA(2) process.
autocorr(y,NumMA=2)
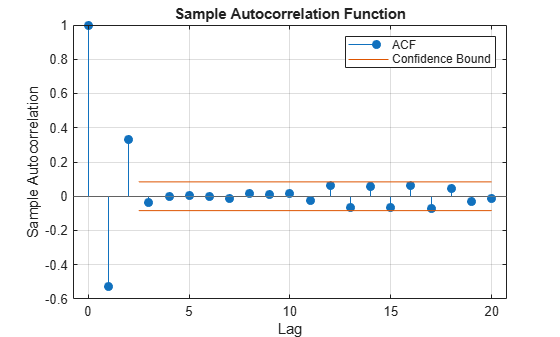
The ACF cuts off after the second lag. This behavior is indicative of an MA(2) process.
Specify the multiplicative seasonal ARMA model:
where is Gaussian with mean 0 and variance 1.
Mdl = arima(AR={0.75,0.15},SAR={0.9,-0.5,0.5}, ...
SARLags=[12 24 36],MA=-0.5,Constant=2, ...
Variance=1);Simulate data from Mdl.
rng(1); % For reproducibility
y = simulate(Mdl,1000); Plot the default autocorrelation function (ACF).
figure autocorr(y)
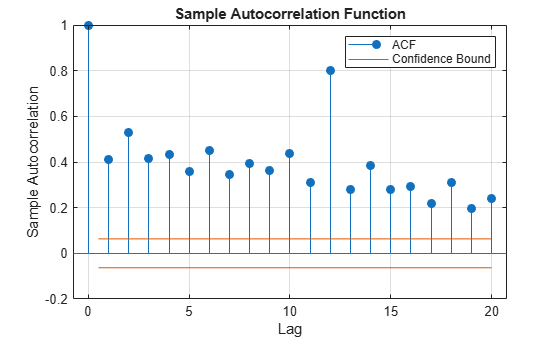
The default correlogram does not display the dependence structure for higher lags.
Plot the ACF for 40 lags.
figure autocorr(y,NumLags=40)
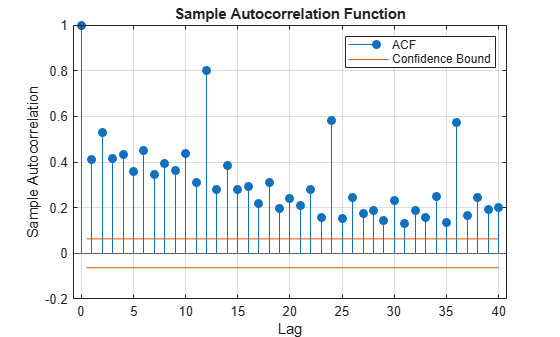
The correlogram shows the larger correlations at lags 12, 24, and 36.
Input Arguments
Name-Value Arguments
Output Arguments
More About
Tips
To plot the ACF without confidence bounds, set
NumSTD=0.
Algorithms
If the input series is a fully observed series (that is, it does not contain any
NaNvalues),autocorruses a Fourier transform to compute the ACF in the frequency domain, then converts back to the time domain using an inverse Fourier transform.If the input series is not fully observed (that is, it contains at least one
NaNvalue),autocorrcomputes the ACF at lag k in the time domain, and includes in the sample average only those terms for which the cross product ytyt+k exists. Consequently, the effective sample size is a random variable.autocorrplots the ACF when you do not return any output or when you return the fourth outputh.
References
[1] Box, George E. P., Gwilym M. Jenkins, and Gregory C. Reinsel. Time Series Analysis: Forecasting and Control. 3rd ed. Englewood Cliffs, NJ: Prentice Hall, 1994.
[2] Hamilton, James D. Time Series Analysis. Princeton, NJ: Princeton University Press, 1994.