egoToWorldLaneBoundarySegments
Convert tracked lane boundaries to lane boundary segments in world coordinates
Since R2024a
Syntax
Description
Add-On Required: This feature requires the Scenario Builder for Automated Driving Toolbox add-on.
lbsegments = egoToWorldLaneBoundarySegments(trackedLaneBoundaries,egoTrajectory)trackedLaneBoundaries in ego
vehicle coordinates into an array of laneBoundarySegment objects lbsegments in world coordinates
by using the ego trajectory information egoTrajectory.
lbsegments = egoToWorldLaneBoundarySegments(trackedLaneBoundaries,egoPose)laneBoundarySegment objects lbsegments in world coordinates
by using the ego pose information egoPose.
lbsegments = egoToWorldLaneBoundarySegments(___,Name=Value)MergeSegments=False
returns lane boundary segments for each valid input frame of the lane data without merging
the lane boundaries with the same lane boundary IDs.
Note: This feature also requires the Sensor Fusion and Tracking Toolbox™.
Examples
Load tracked lane boundary data and ego trajectory data into the workspace.
data = load("recordedLaneTracks","trackedLaneBoundaries","egoTrajectory")
data = struct with fields:
trackedLaneBoundaries: [1×1 laneData]
egoTrajectory: [1×1 waypointTrajectory]
Create lane boundary segments by converting the lane boundaries from ego vehicle coordinates to world coordinates by using ego trajectory data. The egoToWorldLaneBoundarySegments function creates three lane boundary segments from the lane boundary data.
lbsegments = egoToWorldLaneBoundarySegments(data.trackedLaneBoundaries,data.egoTrajectory);
Display the number of created lane boundary segments.
numel(lbsegments)
ans = 3
Create a lane boundary group object from the lane boundary segments.
lbGroup = laneBoundaryGroup(lbsegments)
lbGroup =
laneBoundaryGroup with properties:
BoundarySegments: [3×1 laneBoundarySegment]
SegmentConnections: {2×2 cell}
BoundaryGroups: [1×5 struct]
GeoReference: []
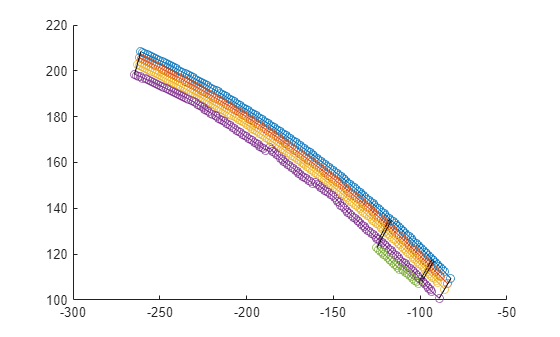
Plot the lane boundary group object. Observe the grouped lane boundary created from three lane boundary segments.
plot(lbGroup)
Load tracked lane boundary data and ego trajectory data into the workspace.
data = load("recordedLaneTracks","trackedLaneBoundaries","egoTrajectory")
data = struct with fields:
trackedLaneBoundaries: [1×1 laneData]
egoTrajectory: [1×1 waypointTrajectory]
Convert the lane boundaries from ego vehicle coordinates to world coordinates, without merging lane boundaries, by using the ego trajectory data. The egoToWorldBoundarySegements function creates 79 lane boundary segments from the lane boundary data.
lbsegments = egoToWorldLaneBoundarySegments(data.trackedLaneBoundaries,data.egoTrajectory,MergeSegments=false);
Display the number of created lane boundary segments.
numel(lbsegments)
ans = 79
Create a lane boundary group object from the lane boundary segments.
lbGroup = laneBoundaryGroup(lbsegments)
lbGroup =
laneBoundaryGroup with properties:
BoundarySegments: [79×1 laneBoundarySegment]
SegmentConnections: {78×2 cell}
BoundaryGroups: [1×5 struct]
GeoReference: []
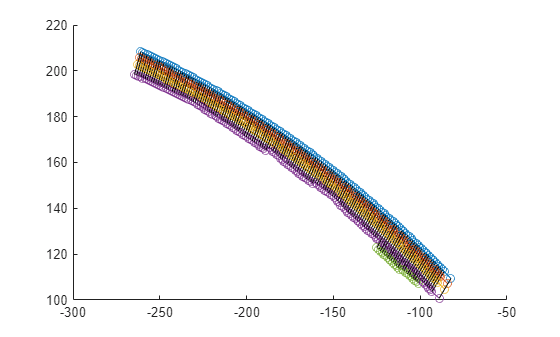
Plot the lane boundary group object. Observe the grouped lane buondary created from 79 lane boundary segments.
plot(lbGroup)
Input Arguments
Name-Value Arguments
Output Arguments
Tips
To group adjacent lane boundary segments using boundary connections, use the
laneBoundaryGroupobject.
Algorithms
If the ego vehicle is stationary for multiple, sequential timestamps, then this function skips the rows of the input
laneDataobject that specify lane information redundant to the first stationary timestamp.For the last row of the input
laneDataobject, this function assumes the distance of the lane boundary from the center of the ego vehicle is 5 meters.
Version History
Introduced in R2024aSee Also
Objects
laneBoundaryDetector|laneBoundaryTracker|laneData|actorTracklist|waypointTrajectory(Sensor Fusion and Tracking Toolbox) |laneBoundarySegment|laneBoundaryGroup