tf
Transferfunktionsmodelle
Beschreibung
Verwenden Sie tf, um reellwertige oder komplexwertige Transferfunktionsmodelle zu erstellen oder um dynamische Systemmodelle in die Transferfunktionsform zu konvertieren.
Transferfunktionen sind eine Frequenzbereich-Darstellung linearer zeitinvarianter Systeme. Betrachten Sie zum Beispiel ein zeitkontinuierliches dynamisches SISO-System, das durch die Transferfunktion sys(s) = N(s)/D(s) dargestellt wird, wobei s = jw und N(s) und D(s) als Zähler- bzw. Nennerpolynome bezeichnet werden. Das tf-Modellobjekt kann SISO- oder MIMO-Transferfunktionen in kontinuierlicher Zeit oder diskreter Zeit darstellen.
Sie können ein Transferfunktions-Modellobjekt entweder durch direkte Angabe seiner Koeffizienten erstellen, oder durch Konvertierung eines Modells eines anderen Typs (z. B. eines Zustandsraummodells ss) in die Transferfunktionsform. Weitere Informationen finden Sie unter Transferfunktionen.
Sie können tf auch verwenden, um verallgemeinerte Zustandsraummodelle (genss) oder unsichere Zustandsraummodelle (uss (Robust Control Toolbox)) zu erstellen.
Erstellung
Syntax
Beschreibung
Erstellen eines Transferfunktionsmodells
sys = tf(numerator,denominator)Numerator und Denominator angegeben werden. Betrachten Sie zum Beispiel ein zeitkontinuierliches dynamisches SISO-System, das durch die Transferfunktion sys(s) = N(s)/D(s) dargestellt wird, wobei die Eingangsargumente numerator und denominator die Koeffizienten von N(s) bzw. D(s) sind.
sys = tf(numerator,denominator,ts)Numerator, Denominator und Ts. Betrachten Sie zum Beispiel ein zeitdiskretes dynamisches SISO-System, das durch die Transferfunktion sys(z) = N(z)/D(z) dargestellt wird. Die Eingangsargumente numerator und denominator sind die Koeffizienten von N(z) bzw. D(z). Wenn Sie die Abtastzeit nicht angeben möchten, setzen Sie das Eingabeargument ts auf -1.
sys = tf(numerator,denominator,ltiSys)ltiSys geerbt wurden, einschließlich der Abtastzeit.
sys = tf(___,PropertyName=Value)
Konvertieren in ein Transferfunktionsmodell
sys = tf(ltiSys,Name=Value)ltiSys durch Berechnung der Nullstellen und Polstellen auf der Grundlage eines oder mehrerer angegebener Name-Wert-Argumente. Da diese Methode Nullstellen für jedes Eingangs-Ausgangs-Paar berechnet, ist sie am besten für Modelle mit kleinen Eingangs-Ausgangs-Größen geeignet. (seit R2025a)
Erstellen einer Variable für rationale Ausdrücke
s = tf('s') erzeugt eine spezielle Variable s, die Sie in einem rationalen Ausdruck verwenden können, um ein zeitkontinuierliches Transferfunktionsmodell zu erstellen. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polynomkoeffizienten.
Eingangsargumente
Name-Wert-Argumente
Ausgangsargumente
Eigenschaften
Objektfunktionen
Die folgenden Listen enthalten eine repräsentative Teilmenge der Funktionen, die Sie mit tf-Modellen verwenden können. Im Allgemeinen ist jede Funktion, die auf Dynamische Systemmodelle anwendbar ist, auch auf ein tf-Objekt anwendbar.
Beispiele
Betrachten Sie in diesem Beispiel das folgende SISO-Transferfunktionsmodell:
Geben Sie die Zähler- und Nennerkoeffizienten in absteigenden Potenzen von s an und erstellen Sie das Transferfunktionsmodell.
numerator = 1; denominator = [2,3,4]; sys = tf(numerator,denominator)
sys =
1
---------------
2 s^2 + 3 s + 4
Continuous-time transfer function.
Model Properties
Betrachten Sie in diesem Beispiel das folgende zeitdiskrete SISO-Transferfunktionsmodell:
Geben Sie die Zähler- und Nennerkoeffizienten in absteigenden Potenzen von z an und verwenden Sie eine Abtastzeit von 0,1 Sekunden. Erstellen Sie das zeitdiskrete Transferfunktionsmodell.
numerator = [2,0]; denominator = [4,0,3,-1]; ts = 0.1; sys = tf(numerator,denominator,ts)
sys =
2 z
---------------
4 z^3 + 3 z - 1
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Betrachten Sie in diesem Beispiel ein Transferfunktionsmodell, das ein System zweiter Ordnung mit bekannter Eigenfrequenz und bekanntem Dämpfungsverhältnis darstellt.
Die Transferfunktion eines Systems zweiter Ordnung, ausgedrückt durch das Dämpfungsverhältnis und die Eigenfrequenz lautet:
Unter der Annahme des Dämpfungsverhältnisses = 0.25 und der Eigenfrequenz = 3 rad/s, erstellen Sie die Transferfunktion zweiter Ordnung.
zeta = 0.25; w0 = 3; numerator = w0^2; denominator = [1,2*zeta*w0,w0^2]; sys = tf(numerator,denominator)
sys =
9
---------------
s^2 + 1.5 s + 9
Continuous-time transfer function.
Model Properties
Untersuchen Sie die Antwort dieser Transferfunktion auf einen Eingangssprung.
stepplot(sys)
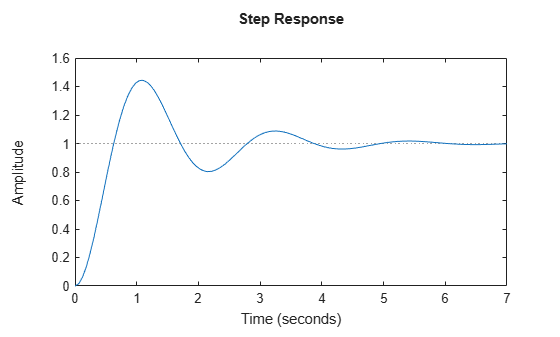
Das Diagramm zeigt das erwartete Abklingen eines Systems zweiter Ordnung mit einem geringen Dämpfungsverhältnis.
Erstellen Sie ein Transferfunktionsmodell für das folgende zeitdiskrete Modell mit mehreren Ein- und Ausgängen:
mit einer Abtastzeit von ts = 0.2 Sekunden.
Geben Sie die Zählerkoeffizienten als 2x2-Matrix an.
numerators = {1 [1 0];[-1 2] 3};Geben Sie die Koeffizienten des gemeinsamen Nenners als Zeilenvektor an.
denominator = [1 0.3];
Erstellen Sie das zeitdiskrete MIMO-Transferfunktionsmodell.
ts = 0.2; sys = tf(numerators,denominator,ts)
sys =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Weitere Informationen zur Erstellung von MIMO-Transferfunktionen finden Sie unter MIMO-Transferfunktionen.
In diesem Beispiel erstellen Sie ein MIMO-Transferfunktionsmodell durch Verkettung von SISO-Transferfunktionsmodellen. Betrachten Sie die folgende Transferfunktion mit einem Eingang und zwei Ausgängen:
Geben Sie das MIMO-Transferfunktionsmodell an, indem Sie die SISO-Einträge verketten.
sys1 = tf([1 -1],[1 1]); sys2 = tf([1 2],[1 4 5]); sys = [sys1;sys2]
sys =
From input to output...
s - 1
1: -----
s + 1
s + 2
2: -------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
Weitere Informationen zur Erstellung von MIMO-Transferfunktionen finden Sie unter MIMO-Transferfunktionen.
In diesem Beispiel erstellen Sie ein zeitkontinuierliches Transferfunktionsmodell unter Verwendung rationaler Ausdrücke. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polynomkoeffizienten für Zähler und Nenner.
Betrachten Sie das folgende System:
Um das Transferfunktionsmodell zu erstellen, geben Sie zunächst s als tf-Objekt an.
s = tf('s')s = s Continuous-time transfer function. Model Properties
Erstellen Sie das Transferfunktionsmodell unter Verwendung von s im rationalen Ausdruck.
sys = s/(s^2 + 2*s + 10)
sys =
s
--------------
s^2 + 2 s + 10
Continuous-time transfer function.
Model Properties
In diesem Beispiel erstellen Sie ein zeitdiskretes Transferfunktionsmodell unter Verwendung eines rationalen Ausdrucks. Die Verwendung eines rationalen Ausdrucks kann manchmal einfacher und intuitiver sein als die Angabe von Polynomkoeffizienten.
Betrachten Sie das folgende System:
Um das Transferfunktionsmodell zu erstellen, geben Sie zunächst z als tf-Objekt und die Abtastzeit Ts an.
ts = 0.1;
z = tf('z',ts)z = z Sample time: 0.1 seconds Discrete-time transfer function. Model Properties
Erstellen Sie das Transferfunktionsmodell unter Verwendung von z im rationalen Ausdruck.
sys = (z - 1) / (z^2 - 1.85*z + 0.9)
sys =
z - 1
------------------
z^2 - 1.85 z + 0.9
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Für dieses Beispiel erstellen Sie ein Transferfunktionsmodell mit Eigenschaften, die von einem anderen Transferfunktionsmodell geerbt wurden. Betrachten Sie die folgenden beiden Transferfunktionen:
In diesem Beispiel erstellen Sie sys1, wobei die Eigenschaften TimeUnit und InputDelay auf 'minutes' eingestellt sind.
numerator1 = [2,0]; denominator1 = [1,8,0]; sys1 = tf(numerator1,denominator1,'TimeUnit','minutes','InputUnit','minutes')
sys1 =
2 s
---------
s^2 + 8 s
Continuous-time transfer function.
Model Properties
propValues1 = [sys1.TimeUnit,sys1.InputUnit]
propValues1 = 1×2 cell
{'minutes'} {'minutes'}
Erstellen Sie das zweite Transferfunktionsmodell mit den von sys1 geerbten Eigenschaften.
numerator2 = [1,-1]; denominator2 = [7,2,0,0,9]; sys2 = tf(numerator2,denominator2,sys1)
sys2 =
s - 1
-----------------
7 s^4 + 2 s^3 + 9
Continuous-time transfer function.
Model Properties
propValues2 = [sys2.TimeUnit,sys2.InputUnit]
propValues2 = 1×2 cell
{'minutes'} {'minutes'}
Beachten Sie, dass das Transferfunktionsmodell sys2 die gleichen Eigenschaften hat wie sys1.
Sie können eine for-Schleife verwenden, um ein Array von Transferfunktionsmodellen anzugeben.
Legen Sie zunächst das Array der Transferfunktionen mit Nullstellen an.
sys = tf(zeros(1,1,3));
Die ersten beiden Indizes stehen für die Anzahl der Ausgänge und Eingänge der Modelle, während der dritte Index die Anzahl der Modelle im Array angibt.
Erstellen Sie das Array für die Transferfunktion mithilfe eines rationalen Ausdrucks in der for-Schleife.
s = tf('s'); for k = 1:3 sys(:,:,k) = k/(s^2+s+k); end sys
sys(:,:,1,1) =
1
-----------
s^2 + s + 1
sys(:,:,2,1) =
2
-----------
s^2 + s + 2
sys(:,:,3,1) =
3
-----------
s^2 + s + 3
3x1 array of continuous-time transfer functions.
Model Properties
Berechnen Sie in diesem Beispiel die Transferfunktion des folgenden Zustandsraummodells:
Erstellen Sie das Zustandsraummodell unter Verwendung der Zustandsraummatrizen.
A = [-2 -1;1 -2]; B = [1 1;2 -1]; C = [1 0]; D = [0 1]; ltiSys = ss(A,B,C,D);
Konvertieren Sie das Zustandsraummodell ltiSys in eine Transferfunktion.
sys = tf(ltiSys)
sys =
From input 1 to output:
s
-------------
s^2 + 4 s + 5
From input 2 to output:
s^2 + 5 s + 8
-------------
s^2 + 4 s + 5
Continuous-time transfer function.
Model Properties
In diesem Beispiel extrahieren Sie die gemessenen Komponenten und die Rauschkomponenten eines identifizierten Polynommodells in zwei separate Transferfunktionen.
Laden Sie das Box-Jenkins-Polynommodell ltiSys in identifiedModel.mat.
load('identifiedModel.mat','ltiSys');
ltiSys ist ein identifiziertes zeitdiskretes Modell der Form: , wobei die gemessene Komponente und die Rauschkomponente darstellt.
Extrahieren Sie die gemessenen Komponenten und die Rauschkomponenten als Transferfunktionen.
sysMeas = tf(ltiSys,'measured') sysMeas =
From input "u1" to output "y1":
-0.1426 z^-1 + 0.1958 z^-2
z^(-2) * ----------------------------
1 - 1.575 z^-1 + 0.6115 z^-2
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
sysNoise = tf(ltiSys,'noise')sysNoise =
From input "v@y1" to output "y1":
0.04556 + 0.03301 z^-1
----------------------------------------
1 - 1.026 z^-1 + 0.26 z^-2 - 0.1949 z^-3
Input groups:
Name Channels
Noise 1
Sample time: 0.04 seconds
Discrete-time transfer function.
Model Properties
Die gemessene Komponente kann als Regelstreckenmodell dienen, während die Rauschkomponente als Störungsmodell für den Entwurf des Regelungssystems verwendet werden kann.
Transferfunktions-Modellobjekte enthalten Modelldaten, die Ihnen helfen, den Überblick darüber zu behalten, was das Modell darstellt. So können Sie beispielsweise den Eingängen und Ausgängen Ihres Modells Namen zuweisen.
Betrachten Sie das folgende zeitdiskrete MIMO-Transferfunktionsmodell:
Dieses Modell hat einen Eingang , Strom, und zwei Ausgänge , Drehmoment und Winkelgeschwindigkeit.
Geben Sie zunächst die Zähler- und Nennerkoeffizienten des Modells an.
numerators = {[1 1] ; 1};
denominators = {[1 2 2] ; [1 0]};Erstellen Sie das Transferfunktionsmodell und geben Sie die Namen der Eingänge und Ausgänge an.
sys = tf(numerators,denominators,'InputName','Current',... 'OutputName',{'Torque' 'Angular Velocity'})
sys =
From input "Current" to output...
s + 1
Torque: -------------
s^2 + 2 s + 2
1
Angular Velocity: -
s
Continuous-time transfer function.
Model Properties
In diesem Beispiel legen Sie die polynomiale Ordnung in zeitdiskreten Transferfunktionsmodellen mithilfe der Eigenschaft 'Variable' fest.
Betrachten Sie die folgenden zeitdiskreten Transferfunktionen mit einer Abtastzeit von 0,1 Sekunden:
Erstellen Sie die erste zeitdiskrete Transferfunktion, indem Sie die z-Koeffizienten angeben.
numerator = [1,0,0]; denominator = [1,2,3]; ts = 0.1; sys1 = tf(numerator,denominator,ts)
sys1 =
z^2
-------------
z^2 + 2 z + 3
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Die Koeffizienten von sys1 sind in absteigenden Potenzen von z geordnet.
tf wechselt basierend auf dem Wert der Eigenschaft 'Variable' die Konvention. Da sys2 das inverse Transferfunktionsmodell von sys1 ist, geben Sie ‚z^-1‘ als ‚Variable‘ an und verwenden dieselben Koeffizienten für Zähler und Nenner.
sys2 = tf(numerator,denominator,ts,'Variable','z^-1')
sys2 =
1
-------------------
1 + 2 z^-1 + 3 z^-2
Sample time: 0.1 seconds
Discrete-time transfer function.
Model Properties
Die Koeffizienten von sys2 sind jetzt in aufsteigenden Potenzen von z^-1 geordnet.
Basierend auf verschiedenen Konventionen können Sie die Polynomordnung in Transferfunktionsmodellen mithilfe der Eigenschaft 'Variable' festlegen.
In diesem Beispiel werden Sie einen Tiefpassfilter mit einem optimierbaren Parameter a erstellen:
Da die Koeffizienten von Zähler und Nenner eines tunableTF-Blocks unabhängig sind, können Sie tunableTF nicht zur Darstellung von F verwenden. Konstruieren Sie F stattdessen mit dem optimierbaren realen Parameterobjekt realp.
Erstellen Sie einen optimierbaren realen Parameter mit einem Anfangswert von 10.
a = realp('a',10)a =
Name: 'a'
Value: 10
Minimum: -Inf
Maximum: Inf
Free: 1
Real scalar parameter.
Verwenden Sie tf, um den abstimmbaren Tiefpassfilter F zu erstellen.
numerator = a; denominator = [1,a]; F = tf(numerator,denominator)
Generalized continuous-time state-space model with 1 outputs, 1 inputs, 1 states, and the following blocks: a: Scalar parameter, 2 occurrences. Model Properties Type "ss(F)" to see the current value and "F.Blocks" to interact with the blocks.
F ist ein genss-Objekt, das den optimierbaren Parameter a in seiner Blocks-Eigenschaft hat. Sie können F mit anderen optimierbaren oder numerischen Modellen verbinden, um komplexere Steuersystemmodelle zu erstellen. Ein Beispiel hierzu finden Sie unter Control System with Tunable Components.
In diesem Beispiel werden Sie ein MIMO-Transferfunktionsmodell mit statischer Verstärkung erstellen.
Betrachten Sie die folgende statische Verstärkungsmatrix m mit zwei Eingängen und zwei Ausgängen:
Geben Sie die Verstärkungsmatrix an und erstellen Sie das Transferfunktionsmodell mit statischer Verstärkung.
m = [2,4;...
3,5];
sys1 = tf(m)sys1 = From input 1 to output... 1: 2 2: 3 From input 2 to output... 1: 4 2: 5 Static gain. Model Properties
Sie können das oben erhaltene Transferfunktionsmodell sys1 mit statischer Verstärkung verwenden, um es mit einem anderen Transferfunktionsmodell zu kaskadieren.
In diesem Beispiel erstellen Sie ein weiteres diskretes Transferfunktionsmodell mit zwei Eingängen und zwei Ausgängen und verwenden die series-Funktion, um die beiden Modelle zu verbinden.
numerators = {1,[1,0];[-1,2],3};
denominator = [1,0.3];
ts = 0.2;
sys2 = tf(numerators,denominator,ts)sys2 =
From input 1 to output...
1
1: -------
z + 0.3
-z + 2
2: -------
z + 0.3
From input 2 to output...
z
1: -------
z + 0.3
3
2: -------
z + 0.3
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
sys = series(sys1,sys2)
sys =
From input 1 to output...
3 z^2 + 2.9 z + 0.6
1: -------------------
z^2 + 0.6 z + 0.09
-2 z^2 + 12.4 z + 3.9
2: ---------------------
z^2 + 0.6 z + 0.09
From input 2 to output...
5 z^2 + 5.5 z + 1.2
1: -------------------
z^2 + 0.6 z + 0.09
-4 z^2 + 21.8 z + 6.9
2: ---------------------
z^2 + 0.6 z + 0.09
Sample time: 0.2 seconds
Discrete-time transfer function.
Model Properties
Seit R2025a
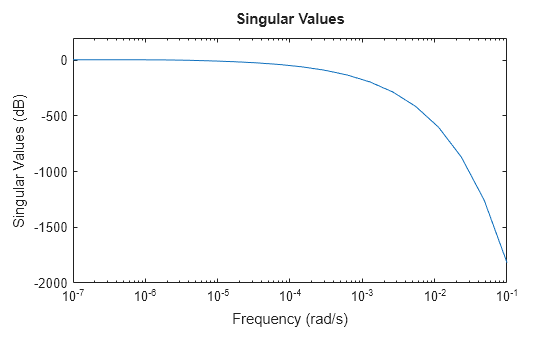
Dieses Beispiel zeigt, wie Sie ein verkürztes Transferfunktionsmodell eines schwach besetzten Zustandsraummodells erhalten. In diesem Beispiel wird ein schwach besetztes Modell verwendet, das durch Linearisierung eines thermischen Modells der Wärmeverteilung in einem kreiszylindrischen Stab gewonnen wurde.
Laden Sie die Modelldaten.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
Analysieren Sie den Frequenzgang des Modells.
sigmaplot(sys,w)
Um eine verkürzte Annäherung zu erhalten, verwenden Sie tf und geben Sie das Frequenzband des Fokus an. Bei diesem Modell können Sie einen Frequenzbereich von 0 rad/s bis 0.01 rad/s verwenden, um die Näherung niedriger Ordnung zu erhalten.
tsys = tf(sys,Focus=[0 1e-2],Display="off");Vergleichen Sie den Frequenzgang.
sigmaplot(sys,tsys,w)

Dieses thermische Modell fällt jenseits von 0.001 rad/s sehr steil ab. Standardmäßig bietet das mit tf erhaltene reduzierte Modell keine gute Übereinstimmung mit diesem Abfall. Um dies abzumildern, können Sie das Argument RollOff von tf verwenden und einen minimalen Abfall-Wert jenseits des fokussierten Frequenzbandes angeben. Geben Sie für die Abfallrate einen Wert von -45 an, was einer Rate von mindestens -900 dB/Dekade entspricht.
tsys2 = tf(sys,Focus=[0 1e-2],RollOff=-45,Display="off");
sigmaplot(sys,tsys2,w)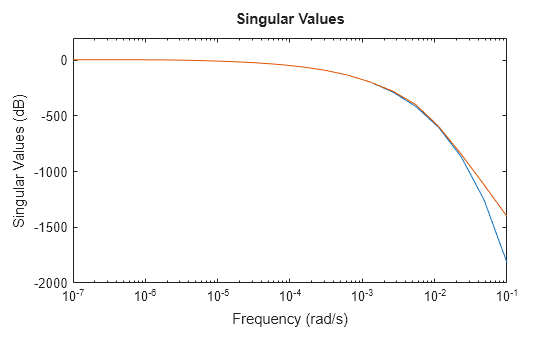
Das reduzierte Modell liefert nun eine viel bessere Annäherung an den Abfall-Wert. In diesem Beispiel führt die Anpassung der Abfallrate mit tf jedoch dazu, dass die Nullstellen und Polstellen erneut berechnet werden müssen. Dies kann bei großen Modellen sehr rechenintensiv sein. Als Alternative können Sie die Methode der Nullpolabschneidung von reducespec verwenden und den Abfall ohne zusätzliche Berechnungskosten anpassen, nachdem die Software die Polstellen und Nullstellen berechnet hat. Ein Beispiel hierzu finden Sie unter Zero-Pole Truncation of Thermal Model.
Beschränkungen
Transferfunktionsmodelle sind für numerische Berechnungen schlecht geeignet. Konvertieren Sie die erstellten Modelle in die Zustandsraumform, bevor Sie sie mit anderen Modellen kombinieren oder Modelltransformationen durchführen. Sie können die resultierenden Modelle dann zu Prüfzwecken wieder in die Transferfunktionsform konvertieren.
Ein identifiziertes nichtlineares Modell kann nicht mit
tfdirekt in ein Transferfunktionsmodell umgewandelt werden. So erhalten Sie ein Transferfunktionsmodell:Konvertieren Sie das identifizierte nichtlineare Modell mit
linapp(System Identification Toolbox),idnlarx/linearize(System Identification Toolbox) oderidnlhw/linearize(System Identification Toolbox) in ein identifiziertes LTI-Modell.Konvertieren Sie das resultierende Modell dann mit
tfin ein Transferfunktionsmodell.
Algorithmen
Zur Konvertierung schwach besetzter Modelle verwendet tf den Krylov-Schur-Algorithmus [1] für inverse Potenziteration, um Polstellen und Nullstellen im angegebenen Frequenzband zu berechnen.
Referenzen
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.