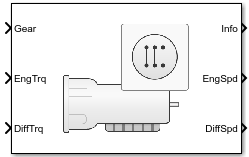
Ideal Fixed Gear Transmission
Ideal fixed gear transmission without clutch or synchronization
Libraries:
Powertrain Blockset /
Transmission /
Transmission Systems
Vehicle Dynamics Blockset /
Powertrain /
Transmission
Description
The Ideal Fixed Gear Transmission implements an idealized fixed-gear transmission without a clutch or synchronization. Use the block to model the overall gear ratio and power loss when you do not need a detailed transmission model, for example, in component-sizing, fuel economy, and emission studies. The block implements a transmission model with minimal parameterization or computational cost.
To specify the block efficiency calculation, for Efficiency factors, select either of these options.
| Setting | Block Implementation |
|---|---|
Gear only | Efficiency determined from a 1D lookup table that is a function of the gear. |
Gear, input torque, input speed, and temperature | Efficiency determined from a 4D lookup table that is a function of:
|
The block uses this equation to determine the transmission dynamics:
The block filters the gear command signal:
Neutral Gear
When Initial gear number, G_o is equal to
0, the initial gear is neutral. The block uses these
parameters to decouple the input flywheel from the downstream gearing.
Initial input velocity, omega_o
Initial neutral input velocity, omegainN_o
The block uses these equations for the neutral gear speed and flywheel.
Power Accounting
For the power accounting, the block implements these equations.
| Bus Signal | Description | Variable | Equations | ||
|---|---|---|---|---|---|
|
|
| Engine power | Peng | |
PwrDiffrntl | Differential power | Pdiff | |||
|
| PwrEffLoss | Mechanical power loss | Peffloss | ||
PwrDampLoss | Mechanical damping loss | Pdamploss | |||
|
| PwrStoredTrans | Rate change in rotational kinetic energy | Pstr | ||
The equations use these variables.
| bN | Engaged gear viscous damping |
| JN | Engaged gear rotational inertia |
| JF | Flywheel rotational inertia |
| ηN | Engaged gear efficiency |
| G | Engaged gear number |
| Gcmd | Gear number to engage |
| N | Engaged gear ratio |
| Ti | Applied input torque, typically from the engine crankshaft or dual mass flywheel damper |
| To | Applied load torque, typically from the differential or drive shaft |
| ωo | Initial input drive shaft rotational velocity |
| ωi, ώi | Applied drive shaft angular speed and acceleration |
| ωNo | Initial neutral gear input rotational velocity |
| ωneutral | Neutral gear drive shaft rotational velocity |
| τs | Shift time constant |