Waypoint Follower
Follow waypoints for UAV
Libraries:
UAV Toolbox /
Algorithms
Description
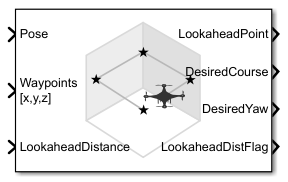
The Waypoint Follower block calculates a lookahead point based on the current UAV pose, a desired lookahead distance, and a specified set of waypoints. The block also returns the desired course and yaw of the UAV at the current position [1].
Specify the UAV type parameter to select your UAV type. Use the Start from parameter to specify how the block determines which waypoint to start from. Specify the Transition radius source parameter to select whether to use a uniform or waypoint-specific transition radius.
Examples

Approximate High-Fidelity UAV Model with UAV Guidance Model Block
Prototype and tune a waypoint following navigation system by using a reduced-order model for UAV.

Tuning Waypoint Following Controller for Fixed-Wing UAV
Design and tune a waypoint following controller for a fixed-wing UAV by using the Guidance Model and Waypoint Follower blocks.
Ports
Input
Output
Parameters
More About
When following a set of waypoints, the waypoint follower might ignore the first waypoint depending on the pose of the UAV. Each consecutive pair of waypoints forms a path segment, and the waypoint follower transitions to the next path segment if the UAV position satisfies at least one of these conditions:
The UAV is inside the transition region of the waypoint at the end of a segment.
The UAV is inside the 3D hyperplane region of the waypoint at the end of a segment
This behavior helps to ensure the UAV follows an achievable path.

The hyperplane condition is satisfied if:
p is the current UAV position. w1 is location of waypoint that starts the current path segment, and w2 is location of waypoint that ends the current path segment.
If you find this behavior limiting, consider adding more waypoints based on your initial pose to force the follower to navigate towards your initial waypoint.
References
[1] Park, Sanghyuk, John Deyst, and Jonathan How. “A New Nonlinear Guidance Logic for Trajectory Tracking.” Paper presented at AIAA Guidance, Navigation, and Control Conference and Exhibit, Providence, Rhode Island. AIAA Guidance, Navigation, and Control Conference and Exhibit, American Institute of Aeronautics and Astronautics, August 16, 2004. https://doi.org/10.2514/6.2004-4900.