Microcontroller with GPIO, ADC and DAC Connections
This example shows how to model the interface between a microcontroller unit (MCU) and a physical system. Here the microcontroller's GPIO, ADC and DAC connections are used to control a DC motor and connected load with limited angle travel. Load angle measurement is via a potentiometer sensor. This measurement is calibrated by initially ramping the rotor position until the photodiode detects the zero-angle light pulse from the LED. Once calibrated the MCU commands a 0.1Hz 45 degree amplitude sinusoid.
Model

Controller Subsystem

GPIO 1 Subsystem

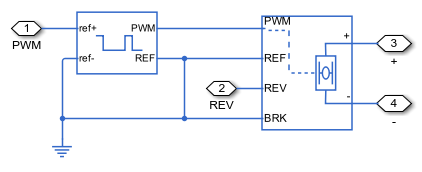
Motor Driver Subsystem
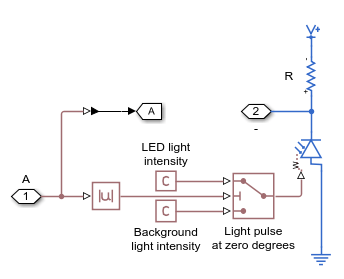
Photodiode Subsystem
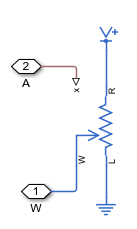
Potentiometer Subsystem
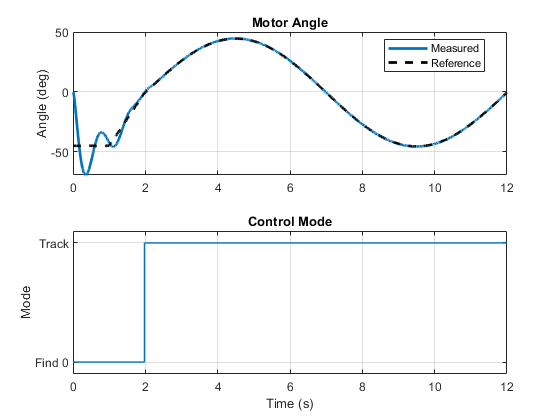
Simulation Results from Simscape Logging
The plot below shows the performance of the motor control system. At the start of simulation, the controller spins the motor until it finds a known position of the motor shaft (0 degrees). After that, the controller tracks the reference signal.
Results from Real-Time Simulation
This example has been tested on these platforms:
Speedgoat™ Performance real-time target machine with an Intel® 3.5 GHz i7 multi-core CPU and 4 GB RAM.
dSPACE® SCALEXIO LabBox with Intel® Core XEON E3-1275v3 at 3.5GHz and 4 GB RAM.
You can run this model in real time with a step size of 300 microseconds by using the Simscape local solver. For small sample rates, a task overrun might occur during the initial task execution due to a cold cache. To avoid this overrun, if the selected platform supports these options, relax the start-up behavior by specifying a limited number of task overruns or increasing the sample time of periodic tasks during the start-up phase of the real-time application.
See Also
Controlled PWM Voltage | H-Bridge | DC Motor | Photodiode