DC5 - One-Quadrant Chopper 5 HP DC Drive with Hysteresis Current Control
This example shows a one-quadrant chopper DC drive with hysteresis current control during speed regulation.
C.Semaille, Louis-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
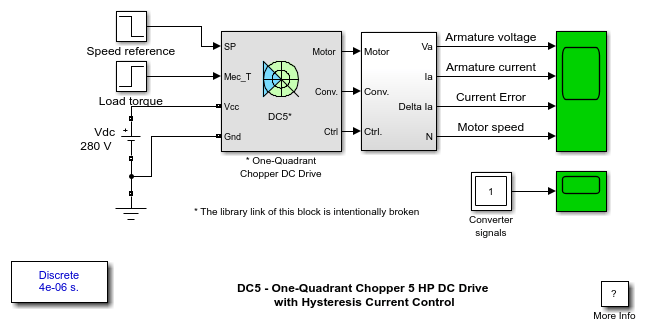
This circuit is based on the DC5 block of Specialized Power Systems. It models a one-quadrant chopper (buck converter) drive for a 5 HP DC motor.
The 5 HP DC motor is separately excited with a constant 150 V DC field voltage source. The armature voltage is provided by an IGBT buck converter controlled by two regulators. The buck converter is fed by a 280 V DC voltage source.
The first regulator is a PI speed regulator, followed by a hysteresis current regulator. The speed regulator outputs the armature current reference (in p.u.) used by the current controller in order to obtain the electromagnetic torque needed to reach the desired speed. The speed reference change rate follows acceleration and deceleration ramps in order to avoid sudden reference changes that could cause armature over-current and destabilize the system. The current regulator controls the armature current by delivering the correct pulses to the IGBT device in order to keep the armature current inside a user-defined hysteresis band. The switching frequency of the IGBT device is limited by the motor inductance and an external inductance placed in series with the armature circuit.
Simulation
Start the simulation. You can observe the motor armature voltage and current, the IGBT pulses and the motor speed on the scope. The current and speed references are also shown.
The speed reference is set at 500 rpm at t = 0 s. Initial load torque is 15 N.m.
Observe that the motor speed follows the reference ramp accurately (+250 rpm/s) and reaches steady-state around t = 2.5 s. The armature current follows the current reference very well and stays limited inside its hysteresis band.
At t = 2.5 s, the load torque passes from 15 N.m to 20 N.m. The motor speed recovers fast and is back at 500 rpm at t = 3 s. The current reference rises to about 16.7 A to generate a higher electromagnetic torque to maintain the speed reference. As observed before, the armature current follows its reference perfectly.
At t = 3 s, the speed reference jumps down to 350 rpm. The armature current lowers in order for the speed to decrease following the negative speed slope (-250 rpm/s) with the help of the load torque.
At t = 4 s, the speed stabilizes around its reference.
Notes
1) The power system has been discretized with a 4 us time step. The control system (regulators) uses a 100 us time step in order to simulate a microcontroller control device.
2) In order to reduce the number of points stored in the scope memory, a decimation factor of 5 is used.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)