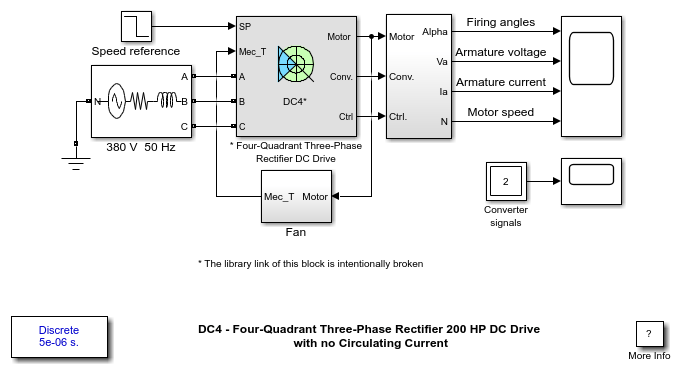
DC4 - Four-Quadrant Three-Phase Rectifier 200 HP DC Drive with No Circulating Current
This example shows a four-quadrant three-phase rectifier DC drive with no circulating current.
C.Semaille, Louis-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
This circuit is based on the DC4 block of Specialized Power Systems. It models a four-quadrant three-phase rectifier (dual-converter topology) drive with no circulating current for a 200 HP DC motor.
The 200 HP DC motor is separately excited with a constant 310 V DC field voltage source. The armature voltage is provided by two three-phase anti-parallel connected converters controlled by two PI regulators. This allows bidirectional current flow through the DC motor armature circuit and thus four-quadrant operation. The converters are fed by a 380 V AC 50 Hz voltage source.
The regulators control the firing angles of both converter thyristors. The first regulator is a speed regulator, followed by a current regulator. The speed regulator outputs the armature current reference (in p.u.) used by the current controller in order to obtain the electromagnetic torque needed to reach the desired speed. The speed reference change rate follows acceleration and deceleration ramps in order to avoid sudden reference changes that could cause armature over-current and destabilize the system. The current regulator controls the armature current by computing the appropriate thyristor firing angles. This generates the converter output voltages needed to obtain the desired armature current.
Compared with the original DC4 block, this circuit models a four-quadrant drive with no circulating current. During this regulation process, the flow of circulating current is completely inhibited by automatic control of the firing pulses. By enabling only one of the two firing pulses needed for the two thyristor converters, only one converter operates at a time and carries the load current. The other converter is temporarily blocked. The firing pulse control is completely managed by the "bridge driver" module. By sensing the reference and load currents, this module determines when converter crossover has to take place by enabling the appropriate converter's firing pulses.
The two firing angles are controlled so that their sum gives 180 degrees. This allows smoother bridge transition. Since circulating current is inhibited, no more inductors are needed to limit the value of this current. However, a 10 mH smoothing inductance is placed in series with the armature circuit to reduce armature current oscillations.
Simulation
Start the simulation. You can observe the motor armature voltage and current, the converter firing angles and the motor speed on the scope. The current and speed references are also shown. A second scope has been added inside the main block to allow you to visualize the converter output currents. The "block_1" and "block_2" signals, controlled by the "bridge driver" module are also visible.
During this simulation the motor is coupled to a fan. The mechanical torque of this type of load is proportional to the square of the speed.
The initial speed reference is set to 1184 rpm, nominal speed. Observe that the motor speed follows the acceleration reference ramp accurately (+320 rpm/s) and reaches steady-state after about 4 s. The slow acceleration is due to the high inertia of the load.
The armature current follows the current reference very well and stabilizes around 330 A. During the acceleration phase, the armature current rises progressively (and thus also the electromagnetic torque produced) the mechanical torque opposed by the load rising with the speed. Only converter 1 is working (Block_1 is low) and converter 2 is inhibited (Block_2 is high). Consequently the output current of converter 1 is equal to the load current and converter 2 outputs no current. Notice that the 10 mH smoothing inductance keeps the armature current oscillations quite small.
At t = 4.5 s, the speed reference drops to -600 rpm and the armature current lowers with the speed to reduce the electromagnetic torque in order to decelerate following the negative speed ramp (-320 rpm/s).
Around t = 5.3 s, the armature current reaches 0 A and bridge crossover takes place to let the armature current become negative. Converter 1 is disabled and converter 2 enabled (Block_1 becomes high and Block_2 becomes low). To avoid simultaneous conduction of both converters (and thus to avoid circulating current) during the crossover, the incoming converter is enabled a few milliseconds after disabling Converter 1. Converter 2 then outputs the load current and the output current of converter 1 is nul. Notice that the current waveforms keep smooth during bridge transition. This negative current now generates a braking torque to keep the fan slowing down.
At t = 8.2 s, the speed reaches 0 rpm and the armature current now generates an accelerating torque to allow the fan to accelerate in the negative speed plane.
At t =11 s, speed and armature current stabilize around -600 rpm and 90 A respectively.
Notes
1) The power system has been discretized with a 5 us time step. The control system (regulators and bridge driver module) uses a 100 us time step in order to simulate a microcontroller control device.
2) In order to reduce the number of points stored in the scope memory, a decimation factor of 10 is used.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)