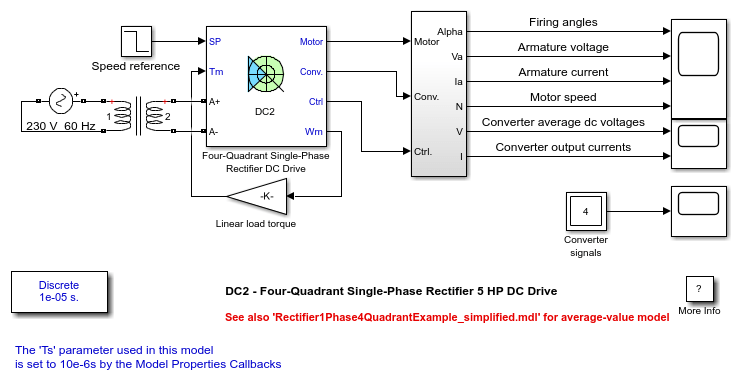
DC2 - Four-Quadrant Single-Phase Rectifier 5 HP DC Drive
This example shows the DC2 four-quadrant single-phase rectifier DC drive with circulating current during speed regulation.
C.Semaille, Louis-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
This circuit uses the DC2 block of Specialized Power Systems. It models a four-quadrant single-phase rectifier (dual-converter topology) drive for a 5 HP DC motor.
The 5 HP DC motor is separately excited with a constant 150 V DC field voltage source. The armature voltage is provided by two single-phase anti-parallel connected converters controlled by two PI regulators. This allows bidirectional current flow through the DC motor armature circuit and thus four-quadrant operation. The converters are fed by a 230 V AC 60 Hz voltage source followed by a linear transformer to boost the voltage up to a sufficient value.
The regulators control the firing angles of both converter thyristors. The first regulator is a speed regulator, followed by a current regulator. The speed regulator outputs the armature current reference (in p.u.) used by the current controller in order to obtain the electromagnetic torque needed to reach the desired speed. The speed reference change rate follows acceleration and deceleration ramps in order to avoid sudden reference changes that could cause armature over-current and destabilize the system. The current regulator controls the armature current by computing the appropriate thyristor firing angles. This generates the converter output voltages needed to obtain the desired armature current.
Both converters operate simultaneously and the two firing angles are controlled so that their sum gives 180 degrees. This produces opposite average voltages at the converter dc output terminals and thus identical average voltages at the DC motor armature, the converters being connected in anti-parallel. One converter is working in rectifier mode while the other is in inverter mode.
The circulating current produced by the instantaneous voltage difference at the terminal of both converters is limited by 80 mH inductors connected between these terminals. A 50 mH smoothing inductance is placed in series with the armature circuit to reduce armature current oscillations.
Simulation
Start the simulation. You can observe the motor armature voltage and current, the converter firing angles and the motor speed on the scope. The current and speed references are also shown. A second scope allows you to visualize the converter average output voltages and output currents.
During this simulation, the motor is coupled to a linear load, which means that the mechanical torque produced by the load is proportional to the speed.
The speed reference is set at 1200 rpm at t = 0 s. Observe that the firing angles are symmetrical around 90 degrees and that the converter average output DC voltages are of opposite signs. The armature current is supplied by converter 1, and the total current in this converter is the sum of load current and circulating current. Converter 2 simply carries the circulating current.
Observe that the motor speed follows the reference ramp accurately (+250 rpm/s) and reaches steady state after 5.5 s. The armature current follows the current reference very well and stabilizes around 12 A.
At t = 6 s, speed reference drops to -600 rpm. The current reference decreases to reduce the electromagnetic torque, and the load torque causes the motor to decelerate. Around t = 10.4 s, the armature current becomes negative and the electromagnetic torque reverses in order to brake the motor down to 0 rpm, the load torque being insufficient to decelerate the motor. At t = 10.8 s, the motor reaches 0 rpm and the load torque becomes negative. The electromagnetic torque now produces an accelerating torque to allow the motor to follow the negative speed ramp (-250 rpm/s). The armature current is now provided by converter 2, converter 1 only handling the circulating current.
At t = 13.2 s, speed stabilizes at -600 rpm.
Notes
1) The power system has been discretized with a 10 us time step. The control system (regulators) uses a 100 us sample time in order to simulate a microcontroller control device.
2) In order to reduce the number of points stored in the scope memory, a decimation factor of 20 is used.
3) A simplified version of the model using average-value rectifiers can be used by selecting 'Average' in the 'Model detail level' menu of the graphical user-interface. The time step can then be increased up to the control system sample time value.This can be done by typing 'Ts = 100e-6' in the workspace in the case of this example. See also dc2_example_simplified model.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)