AC8 - Comparison Between Detailed and Simplified Models
This example shows the AC8 detailed model and the AC8 average model during speed regulation.
J-F. Doyon, L.-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
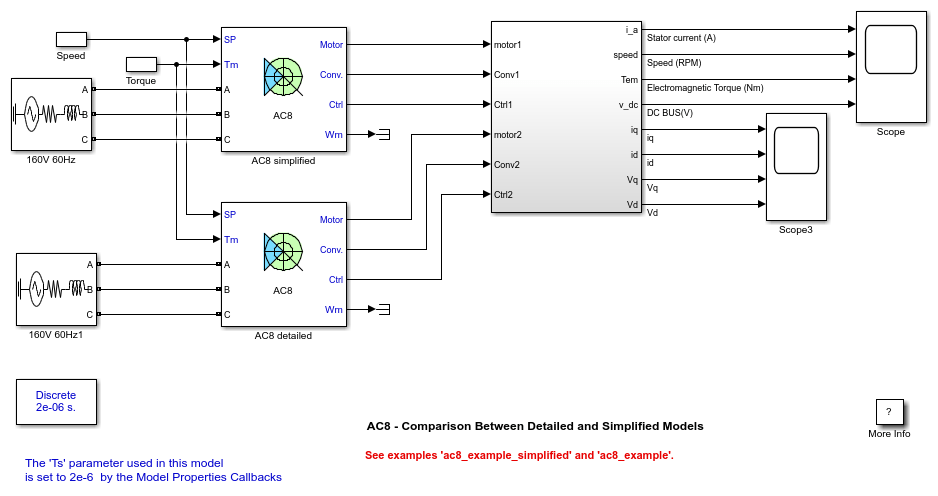
This circuit uses two AC8 blocks of Specialized Power Systems library. It models a five-phase permanent magnet (PM) synchronous motor drive with a braking chopper for a 4.4kW motor. The first block is set to average value model and the second is set to detailed model.
For the detailed model, the five-phase PM synchronous motor is fed by a PWM voltage source inverter, which is built using a Universal Bridge Block. The average value model uses ideal voltages and currents sources to feed the PM synchronous motor. The speed control loop uses a PI regulator to produce the flux and torque references for the vector control block. The vector control block computes the five reference motor line currents corresponding to the flux and torque references and then feeds the motor with these currents using a five-phase current regulator.
Motor currents, voltages, speed, and torque signals are available at the output of the block.
Simulation
Start the simulation. You can observe the motor stator current, the rotor speed, the electromagnetic torque and the DC bus voltage on the first scope. The speed set point and the torque set point are also shown. On the second scope, the dq currents and voltages are displayed. Note that all signals are multiplexed to compare the two models.
At time t = 0 s, the speed set point is 900 rpm and a 25 Nm load torque is applied to the motor. Observe that the speed follows precisely the acceleration ramp.
At t = 0.45 s, the speed set point is reached by both drives.
At t = 1.2 s, the speed set point is changed to -900 rpm.
At t = 2 s., the mechanical load passes from 25 Nm to -25 Nm. You can observe a small disturbance in the motor speed, which stabilizes very quickly.
At t = 2.1 s., the speed set point is reached by both drives.
Finally, note how the simplified model reacts well compared to the detailed model.
Notes
To evaluate the speed gain of the average value model, see ac8_example_simplified and compare the simulation speed with PMSMDrive5Phase example.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)