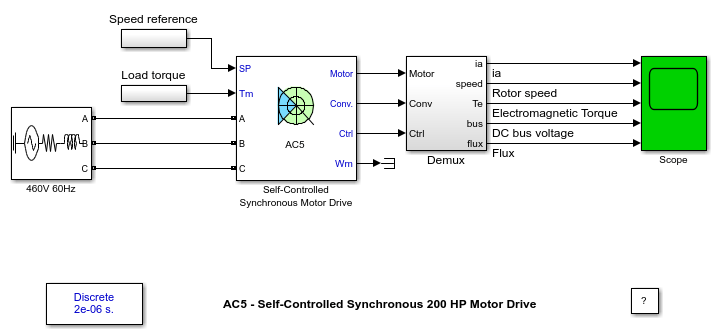
AC5 - Self-Controlled Synchronous 200 HP Motor Drive
This example shows the AC5 Self-Controlled Synchronous motor drive during speed regulation.
H.Blanchette, L.-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
This circuit uses the AC5 block of Specialized Power Systems library. It models a self-controlled synchronous motor drive with active front-end rectifier for a 200HP motor.
The synchronous motor is fed by a PWM voltage source inverter, which is built using a Universal Bridge Block. The speed control loop uses a PI regulator to produce the flux and current references for the vector controller block. The vector controller computes the three reference motor line currents corresponding to the torque reference and feeds the motor with these currents using a three-phase current regulator. The vector controller also computes the flux estimate and compares it with the desired value in order to generate the field excitation voltage.
Since the field flux dynamics of the synchronous machine are relatively slow, it is advisable to establish first the field flux to its nominal value before feeding the stator with three-phase currents. In this example, a high magnetization voltage of 600V is applied to the rotor field during the first 0.2 s of the simulation in order to speed up the rotor field increase. Once the field flux has reached its nominal value of 1.0 weber, the three-phase current regulator associated to the motor stator is switched on.
Motor current, speed, and torque signals are available at the output of the block.
Simulation
Start the simulation. You can observe the motor stator current, the rotor speed, the electromagnetic torque and the DC bus voltage and the motor magnetic flux on the scope. The speed set point and the torque set point are also shown.
At time t = 1.5 s, the speed set point is 200 rpm. Observe that the speed follows precisely the acceleration ramp and that the stator current amplitude and frequency increase gradually.
At t = 3.0 s, a resistive torque of the nominal value is applied to the motor shaft. Recall that this type of torque tends to decelerate the motor. This explains why the motor speed slightly undershoots. Then, the motor reaches 200 rpm.
At t = 4.0 s, the speed set point is changed to 0 rpm. This forces the motor to produce a lower electric torque. The speed decreases down to 0 rpm following precisely the deceleration ramp. At t = 6.0 s, the speed setpoint reaches 0 rpm.
At t = 5.5 s, the sign of the load torque applied to the motor shaft is reversed. Observe the corresponding small overshoot in the motor speed and the stabilization of the electric torque at its nominal value.
Finally, note how well the DC bus voltage is regulated during the whole simulation period.
Notes
1) The power system has been discretised with a 2us time step. The speed controller uses a 140 us sample and the vector controller uses a 20 us sample time in order to simulate a microcontroller control device.
2) The torque sign convention of the synchronous machine is different from the one of the asynchronous and PM synchronous machines. That is, the synchronous machine is in the motor operation mode when the electric torque is negative and in the generator operation mode when the electric torque is positive.
3) A simplified version of the model using average-value inverter and rectifier can be used by selecting 'Average' in the 'Model detail level' menu of the graphical user-interface. The time step can then be increased up to 50 us. This can be done by typing 'Ts = 50e-6' in the workspace and by changing the speed controller sampling time to 150e-6, the DC bus controller sampling time to 50e-6 and the vector controller sampling time to 50e-6. See also ac5_example_simplified model.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)