Creating a Four Bar Multibody Mechanism in MATLAB
This example constructs a four bar mechanism in MATLAB® using Simscape™ Multibody™. It demonstrates various classes under simscape.multibody.* namespace to build a multibody system in MATLAB.
Open the model and use a custom function fourbar to construct the four-bar multibody with user specified link lengths. Each parameter is expected to be a Simscape Value, specifying a scalar length.
[fb, op] = fourBar(simscape.Value(12,"cm"), simscape.Value(10,"cm"), simscape.Value(5,"cm"), simscape.Value(8,"cm"));
The four-bar is constructed so that the X-Y plane is the plane of motion, with gravity in the -Y direction. Output op is an operating point that sets the bottom left joint angle to a nominal value with high priority.
To visualize the mechanism, run the following:
cmb = compile(fb);
visualize(cmb,computeState(cmb,op),"vizFourBar");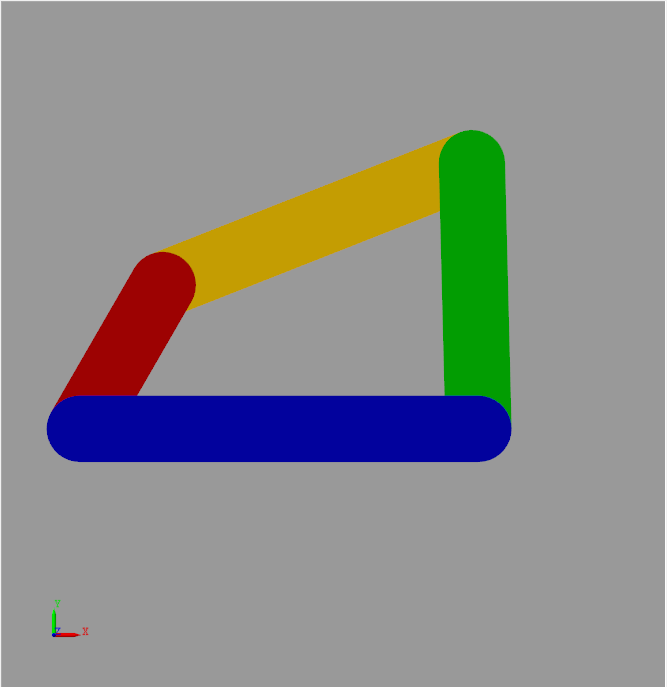
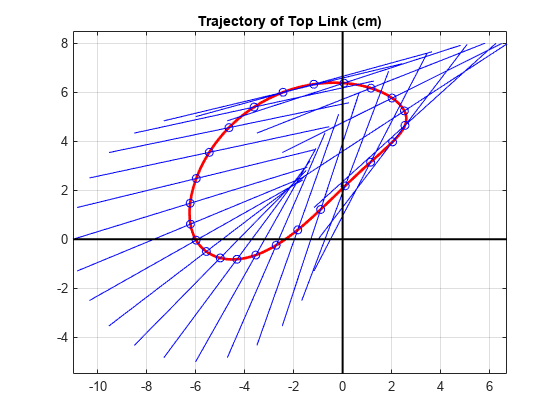
Once the four bar mechanism is created, we can also perform some analysis on it like computing and plotting the trajectory of the top (distal) link of the specified four-bar mechanism. The function fourBarMotionPlot plots the trajectory of the top link over a full 360 deg range of the crank angle (when the left link is a crank of the four bar). This function varies the crank angle over a full 360-deg range in steps of 1 deg. The trajectory of the midpoint of the top link is plotted over these 1-deg steps to form a (typically) smooth curve. The coordinates along this curve are relative to the world frame.
fourBarMotionPlot(fb);