Unbalanced Load
Load with angle-dependent rotational inertia

Libraries:
Simscape /
Driveline /
Inertias & Loads
Description
The Unbalanced Load block represents the effects of a load whose rotational inertia varies with the rotation angle. Examples include the wobbling of a spinning axle and shaking of an off-center rotating machine. You can specify the load inertia in terms of its rotation path or as an angle-inertia lookup table.
The block provides two rotation path parameterizations. One assumes circular motion of the unbalanced load. The other assumes elliptical motion. In each case, the distance between the unbalanced load and the main rotation axis varies with the rotation angle. The varying distance causes the moment of inertia, given by the parallel-axis theorem, to vary during rotation:
where:
I is the moment of inertia about the main rotation axis.
I0 is the moment of inertia about the intrinsic rotation axis of the unbalanced load.
M is the total mass of the unbalanced load.
r is the distance between the unbalanced load and the main rotation axis.
The angle dependence of the moment of inertia leads to an angle dependence of the inertial torque acting on the unbalanced load:
where:
TI is the inertial torque.
ω is the angular velocity of the load.
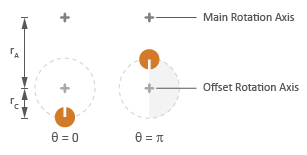
If the load moves in a circular path, its distance to the main rotation axis is given by
where:
rA is the distance between the main rotation axis and the offset rotation axis.
rC is the radius of the circular path.
Circular Rotation Path
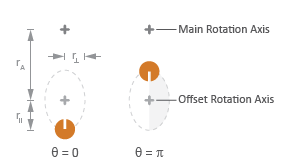
If the load moves in an elliptical path, its distance to the main rotation axis is given by
where:
r∥ is the radius of the elliptical path in line with the distance from the main rotation axis.
r⊥ is radius of the elliptical path perpendicular to the distance from the main rotation axis.
Elliptical Rotation Path
Examples

Manipulator with Unbalanced Load
A manipulator controlling the orientation of an end effector through an unbalanced arm. The motor is represented as a torque source using simple proportional control. The load on the end effector increases sharply when the end effector secures the load. Noise is introduced at each sensor to measure its effect on controller performance.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2015b