platform
Syntax
Description
platform(
adds scenario,trajectory)Platform objects to
satellite scenario using the trajectory from the geoTrajectory system object.
platform(
adds scenario,positiontable)Platform objects to
the satellite scenario from position data.
Note
If the user wants to use NED, they can explicitly create a geoTrajectory, which
includes an Frame flag, and use that as a single input for the platform.
platform(
adds a scenario,positiontable,velocitytable)Platform objects to
the satellite scenario from position and velocity data.
Note
If the user wants to use NED, they can explicitly create a geoTrajectory, which
includes an Frame flag, and use that as a single input for the platform.
platform(
adds a scenario,positiontimeseries)Platform
object to the satellite scenario from position (in meters) data specified in the
positiontimeseries (timeseries object).
platform(
adds a scenario,positiontimeseries,velocitytimeseries)Platform object to the
satellite scenario from position (in meters) data specified in the
positiontimeseries (timeseries object) and velocity (in
meters/second) data specified in the velocitytimeseries (timeseries object).
platform(___, specifies
options using one or more name-value arguments in addition to any input argument
combination from previous syntaxes. Name,Value)
pltf = platform(___)Platform object
platform to the satellite scenario and returns a vector of handles to these platforms.
Note
When the AutoSimulate property of the satelliteScenario is false, SimulationStatus is NotStarted while calling
platform. You can use the restart
function to reset SimulationStatus to
NotStarted. Note that calling restart will
erase the simulation data.
Examples
Create a scenario using satelliteScenario.
sc = satelliteScenario(); viewer = satelliteScenarioViewer(sc);
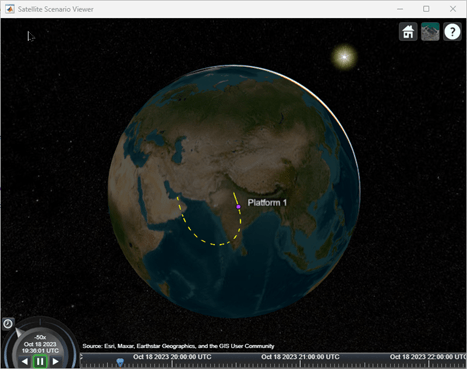
Consider an aircraft taking off from Delhi International Airport, flying over Bangalore, and then landing in Dubai. The total flying time is three hours. Create a trajectory using geoTrajectory.
trajectory = geoTrajectory([28.5567,77.1006,10600;13.1989,77.7068,30600;25.2566,55.3641,5600],[0,3600,3*3600],AutoPitch=true,AutoBank=true);
Add a platform to the satellite scenario based on the trajectory.
pltf = platform(sc,trajectory)
pltf =
Platform with properties:
Name: Platform 1
ID: 1
ConicalSensors: [1x0 matlabshared.satellitescenario.ConicalSensor]
Gimbals: [1x0 matlabshared.satellitescenario.Gimbal]
Transmitters: [1x0 satcom.satellitescenario.Transmitter]
Receivers: [1x0 satcom.satellitescenario.Receiver]
Accesses: [1x0 matlabshared.satellitescenario.Access]
Eclipse: [1x0 Aero.satellitescenario.Eclipse]
GroundTrack: [1x1 matlabshared.satellitescenario.GroundTrack]
Path: [1x1 matlabshared.satellitescenario.Path]
CoordinateAxes: [1x1 matlabshared.satellitescenario.CoordinateAxes]
MarkerColor: [0.7176 0.2745 1]
MarkerSize: 6
ShowLabel: true
LabelFontColor: [1 1 1]
LabelFontSize: 15
Visual3DModel:
Visual3DModelScale: 1
hide(pltf.Path); show(pltf.GroundTrack);
Play viewer.
play(sc);
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example:
Name = 'MySatellite' sets the satellite name to
'MySatellite'.
Attitude data, specified as a MATLAB
timeseries object or a
MATLAB
timetable object or a MATLAB
table object.
If the attitude specified is a MATLAB
timetable then:
If
pltfcontains a single platform, the table must contain one data column of scalar-first quaternions [1-by-4] or ZYX Euler angles [1-by-3].If
pltfis an array of platform, each data row must contain either:Multiple columns, where each column contains data for an individual platform over time.
One column of 2-D data, where the length of one dimension must equal 3 or 4, depending on whether Euler angles or quaternions are used, and the remaining dimension must have length equal to the number of platforms in
pltf.One column of 3-D data, where the length of one dimension must equal 3 or 4, depending on whether Euler angles or quaternions are used, one dimension is a singleton, and the remaining dimension must have length equal to the number of platforms in
pltf.
If the attitude specified is a MATLAB
timeseries containing scalar quaternions or ZYX Euler angles then:
If the
Dataproperty oftimeserieshas two dimensions, the length of one dimension must equal 3 or 4, depending on whether Euler angles or quaternions are used, and the other dimension must align with the orientation of the time vector.If
pltfis an array of platforms, theDataproperty oftimeseriesmust have three dimensions where the length of one dimension must equal 3 or 4, depending on whether Euler angles or quaternions are used, either the first or the last dimension must align with the orientation of the time vector, and the remaining dimension must align with the number of platforms inpltf.If the user wants to use ENU instead, they must explicitly construct a
geoTrajectoryobject and pass that to the platform function.
For more information on quaternions, see quaternion.
Data Types: timeseries | table
Name of the visual 3-D model file that you want to render in the viewer, specified as a string with .GLTF, .GLB, or .STL extension. For GLB and GLTF models, gITF uses a right-hand coordinate system. gITF defines +Y as up, and +Z as forward, and -X as right. A gITF asset faces +Z. For more information, see https://registry.khronos.org/glTF/specs/2.0/glTF-2.0.html#coordinate-system-and-units. The mesh of the GLB is in meters.
Note
You can set this property NarrowBodyAirliner.glb to add a 3-D
model of an aircraft to satellite scenario viewer.

Data Types: string
Linear scaling of the visual 3-D model rendered in the viewer, specified as a nonnegative integer. The scaling assumes that the GLB model is in meters.
Data Types: double
Output Arguments
Version History
Introduced in R2024a