Install and Set Up Virtual Machine for ROS and Gazebo
This page provides installation instructions for the Virtual Machine (VM), which is shipped as a supplement to ROS Toolbox and Robotics System Toolbox™. The VM comes preinstalled with Gazebo and ROS, enabling MATLAB® and Simulink® to seamlessly integrate with the Gazebo robot simulator and an external ROS (Robot Operating System). It runs on Ubuntu® 20.04 and supports multiple platforms, including Windows®, Linux®, and Mac.
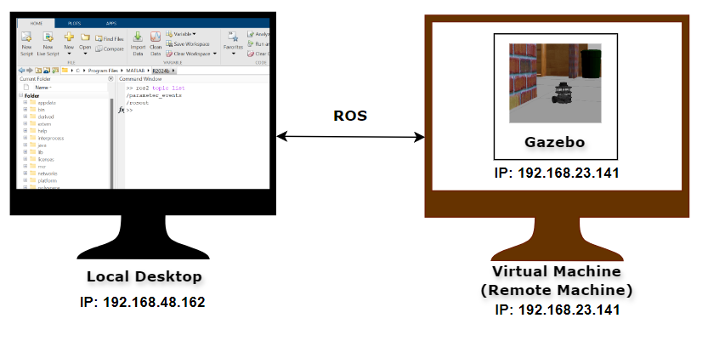
This graphic image below is a sample demonstration of connectivity between local host machine and remote device running Gazebo on VM.
This preconfigured VM image is designed to support examples in ROS Toolbox and includes the following:
ROS Noetic desktop installation
Gazebo robot simulator 11.0.0
Example Gazebo worlds for a simulated TurtleBot 3
Note
Starting R2025a, the VM image shipped with ROS Toolbox does not include any ROS 2 installation. For ROS 2 resources, refer to Install and Set Up Docker for ROS, ROS 2, and Gazebo.
Instructions for Platform-Based Virtual Machine Installation
Setup Instructions post Virtual Machine Installation
![]() Set Up Virtual Machine Image Shipped with ROS Toolbox
Set Up Virtual Machine Image Shipped with ROS Toolbox
![]() Set up Externally Sourced Virtual Machine Image
Set up Externally Sourced Virtual Machine Image
For related information about configuring VM and setting up a Gazebo world, see Get Started with Gazebo and Simulated TurtleBot.