Subscribe
Receive messages from ROS network
Libraries:
ROS Toolbox /
ROS
Description
The Subscribe block creates a Simulink® nonvirtual bus that corresponds to the specified ROS message type. The block uses the node of the Simulink model to create a ROS subscriber for a specific topic. This node is created when the model runs and is deleted when the model terminates. If the model does not have a node, the block creates one.
On each simulation step, the block checks if a new message is available on the specific topic. If a new message is available, the block retrieves the message and converts it to a Simulink bus signal. The Msg port outputs this new message. If a new message is not available, Msg outputs the last received ROS message. If a message has not been received since the start of the simulation, Msg outputs a blank message.
Examples
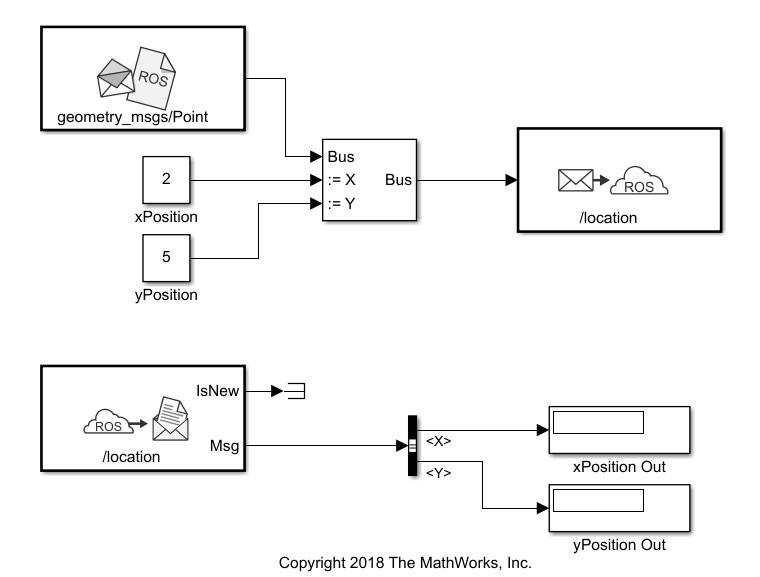
Publish and Subscribe to ROS Messages in Simulink
Publish and subscribe to a ROS topic using Simulink.
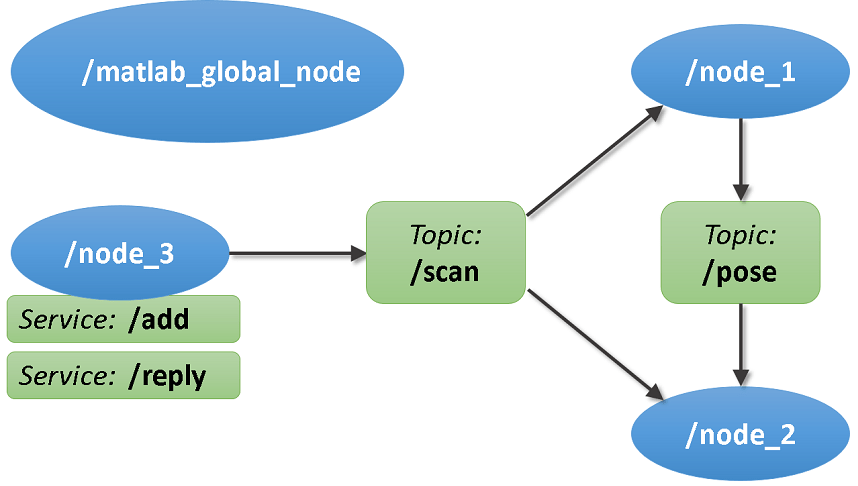
Get Started with ROS
Set up ROS within MATLAB®, and get information about ROS network and ROS messages.

Connect to ROS-enabled Robot from Simulink
Configure Simulink to connect to a separate robot simulator using ROS and then send velocity commands, and receive position information from a simulated robot.

Feedback Control of a ROS-Enabled Robot
Use Simulink to control a simulated robot running in a separate ROS-based simulator.
Ports
Output
Parameters
Tips
You can also set the addresses for the ROS master and node host by clicking the Configure network addresses link in the block.
Extended Capabilities
Version History
Introduced in R2019b