read
Description
Examples
Create a robot scenario.
scenario = robotScenario(UpdateRate=100,StopTime=1);
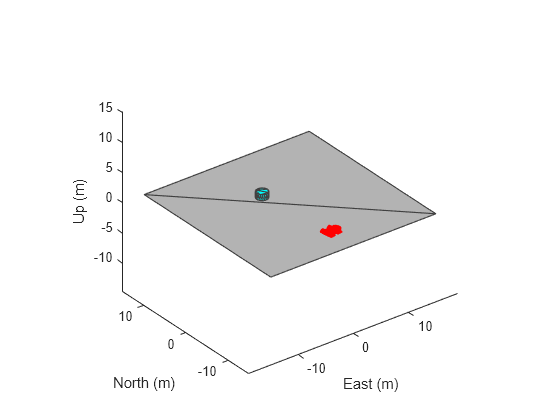
Add the ground plane and a cylinder as meshes.
addMesh(scenario,"Plane",Size=[30 30],Color=[0.7 0.7 0.7]) addMesh(scenario,"Cylinder",Position=[-2 4 0.5],Color=[0 1 1])
Create a robot platform with a specified waypoint trajectory in the scenario. Define the mesh for the robot platform.
traj = waypointTrajectory("Waypoints",[0 -10 0; 10 0 0; -10 10 0; 0 -10 0], ... "TimeOfArrival",[0 0.33 0.66 1], ... "ReferenceFrame","ENU"); platform = robotPlatform("Robot",scenario, ... BaseTrajectory=traj); updateMesh(platform,"GroundVehicle",Scale=3);
Simulate and visualize the scenario.
setup(scenario); idx = 1; while advance(scenario) motion(idx,:) = read(platform); show3D(scenario); drawnow update idx = idx+1; end
restart(scenario);
Input Arguments
Output Arguments
Version History
Introduced in R2022a