seareflectivity
Normalized sea surface reflectivity
Syntax
Description
nrcs = seareflectivity(scale,graz,freq)nrcs for the sea state
scale at the grazing angle graz with the
transmitted frequency freq. In this syntax, sea surface reflectivity is
calculated using the NRL Sea Clutter Model by Gregers-Hansen and Mittal. The reflectivity is
also called the normalized radar cross section (NRCS) and denoted
σ0.
[
returns additional outputs:nrcs,hgtsd,beta0,windvelocity] = seareflectivity(___)
hgtsd— Standard deviation of the surface height for the specified sea state number.beta0— Slope of the sea type.beta0is 1.4 times the root mean square (RMS) surface slope. The surface σ0 value for sea clutter reflectivity is computed based on the NRL Sea Clutter Model by Gregers-Hansen and Mittal.windvelocity— Wind velocity.
Examples
Calculate the NRCS of a sea clutter patch. Assume that the patch is the sea with sea state number equal to 2 and the radar system operates at a frequency of 30 GHz. Also assume the grazing angle is 10 degrees.
scale = 2; graz = 10; freq = 30e9;
Calculate the normalized NRCS for the sea clutter patch.
nrcs = seareflectivity(scale,graz,freq)
nrcs = 2.1555e-04
You can use the normalized RCS to calculate the total clutter patch RCS.
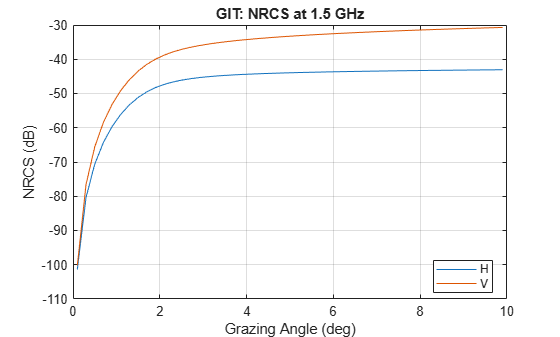
Calculate and plot the horizontal and vertical reflectivities from the GIT model. The radar operates at an L-band frequency of 1.5 GHz at grazing angles from 0.1 to 10 degrees. Assume sea state 3.
seastate = 3;
graz = 0.1:0.2:10;
freq = 1.5e9;
model = 'GIT';Compute the horizontal and vertical polarized reflectivities.
reflh = seareflectivity(seastate,graz,freq, ... Model = model,Polarization = 'H'); reflv = seareflectivity(seastate,graz,freq, ... Model = model,Polarization = 'V');
Plot the reflectivities as a function of grazing angle.
plot(graz,pow2db(reflh)) hold on grid on plot(graz,pow2db(reflv)) legend('H','V','Location','Best') xlabel('Grazing Angle (deg)') ylabel('NRCS (dB)') title('GIT: NRCS at 1.5 GHz')
Input Arguments
Output Arguments
More About
References
[1] Gregers-Hansen, V. and Mittal, R. "An Improved Empirical Model for Radar Sea Clutter Reflectivity." NRL/MR/5310-12-9346, Apr. 27, 2012.
[2] Barton, David Knox. Radar Equations for Modern Radar. Artech House, 2013.
[3] Reilly, J. P., R. L. McDonald, and G. D. Dockery. "RF-Environment Models for the ADSAM Program." Report No. A1A97U-070, Laurel, MD: Johns Hopkins University Applied Physics Laboratory, August 22, 1997.
[4] Ward, Keith D., Simon Watts, and Robert J. A. Tough. Sea Clutter: Scattering, the K-Distribution and Radar Performance. IET Radar, Sonar, Navigation and Avionics Series 20. London: Institution of Engineering and Technology, 2006.
[5] Antipov, Irina. "Simulation of Sea Clutter Returns." Department of Defence, June 1998.
[6] Masuko, Harunobu, Ken'ichi Okamoto, Masanobu Shimada, and Shuntaro Niwa. "Measurement of Microwave Backscattering Signatures of the Ocean Surface Using X Band and K a Band Airborne Scatterometers." Journal of Geophysical Research 91, no. C11 (1986): 13065. https://doi.org/10.1029/JC091iC11p13065.
[7] Nathanson, Fred E., et al. Radar Design Principles: Signal Processing and the Environment. 2. ed., Repr, Scitech Publ, 2004.
Extended Capabilities
Version History
Introduced in R2021a
See Also
searoughness | landroughness | landreflectivity | clutterSurfaceRCS | surfaceReflectivitySea