patternElevation
System object: phased.HeterogeneousULA
Namespace: phased
Plot heterogeneous ULA directivity or pattern versus elevation
Syntax
patternElevation(sArray,FREQ)
patternElevation(sArray,FREQ,AZ)
patternElevation(sArray,FREQ,AZ,Name,Value)
PAT = patternElevation(___)
Description
patternElevation( plots
the 2-D array directivity pattern versus elevation (in dBi) for the
array sArray,FREQ)sArray at zero degrees azimuth angle. When AZ is
a vector, multiple overlaid plots are created. The argument FREQ specifies
the operating frequency.
The integration used when computing array directivity has a minimum sampling grid of 0.1 degrees. If an array pattern has a beamwidth smaller than this, the directivity value will be inaccurate.
patternElevation(,
in addition, plots the 2-D element directivity pattern versus elevation
(in dBi) at the azimuth angle specified by sArray,FREQ,AZ)AZ.
When AZ is a vector, multiple overlaid plots
are created.
patternElevation(
plots the array pattern with additional options specified by one or
more sArray,FREQ,AZ,Name,Value)Name,Value pair arguments.
PAT = patternElevation(___)PAT is a matrix whose entries
represent the pattern at corresponding sampling points specified by
the 'Elevation' parameter and the AZ input
argument.
Input Arguments
Name-Value Arguments
Output Arguments
Examples
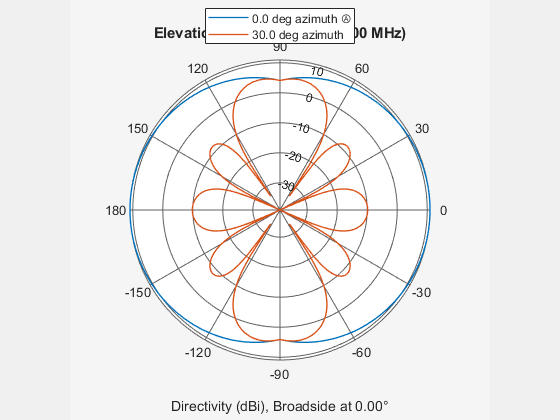
Create an 11-element heterogeneous ULA from short-dipole antenna elements with different axis directions. The element spacing is 0.4 meters. Draw the elevation power pattern for 0 and 30 degrees azimuth for 300 MHz.
Construct Heterogeneous ULA
Construct the array from z-directed and y-directed short dipole antenna elements.
sElement1 = phased.ShortDipoleAntennaElement(... 'FrequencyRange',[200e6 500e6],... 'AxisDirection','Z'); sElement2 = phased.ShortDipoleAntennaElement(... 'FrequencyRange',[200e6 500e6],... 'AxisDirection','Y'); sArray = phased.HeterogeneousULA(... 'ElementSpacing',0.4,... 'ElementSet',{sElement1,sElement2},... 'ElementIndices',[1 1 1 2 2 2 2 2 1 1 1]);
Plot Directivity Pattern
fc = 300e6; c = physconst('LightSpeed'); patternElevation(sArray,fc,[0,30],... 'PropagationSpeed',c,... 'Type','directivity')
More About
Version History
Introduced in R2015a