directivity
System object: phased.CustomMicrophoneElement
Namespace: phased
Directivity of custom microphone element
Syntax
D = directivity(H,FREQ,ANGLE)
Description
D = directivity( returns
the Directivity (dBi) of a custom microphone
element, H,FREQ,ANGLE)H, at frequencies specified by FREQ and
in direction angles specified by ANGLE.
Input Arguments
Output Arguments
Examples
Compute the directivity of a custom microphone element. Create a custom cardioid microphone, and plot the microphone's response at 700 Hz for elevations between -90 and +90 degrees.
Define the pattern for the custom microphone element. The System object's PolarPatternAngles property has default value of [-180:180] degrees.
myAnt = phased.CustomMicrophoneElement; myAnt.PolarPatternFrequencies = [500 1000]; myAnt.PolarPattern = mag2db([... 0.5+0.5*cosd(myAnt.PolarPatternAngles);... 0.6+0.4*cosd(myAnt.PolarPatternAngles)]);
Calculate the directivity as a function of elevation at zero degrees azimuth.
elev = [-90:5:90]; azm = zeros(size(elev)); ang = [azm;elev]; freq = 700; d = directivity(myAnt,freq,ang); plot(elev,d) xlabel('Elevation (deg)') ylabel('Directivity (dBi)')
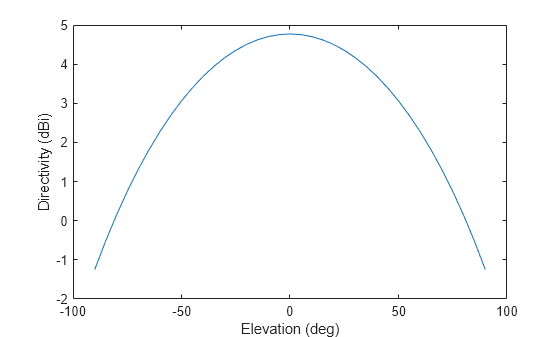
The directivity is maximum at elevation.