Using MPC Controller Block Inside Function-Call and Triggered Subsystems
This example shows how to configure and simulate MPC Controller blocks placed inside Function-Call and Triggered subsystems.
Define Plant Model and MPC Controller
Define a plant.
plant = ss(tf([3 1],[1 0.6 1]));
Define the MPC controller for the plant.
Ts = 0.1; % Sampling time p = 10; % Prediction horizon m = 2; % Control horizon Weights = struct(MV=0,MVRate=0.01,OV=1); % Weights MV = struct(Min=-Inf,Max=Inf,RateMin=-100,RateMax=100); % Input constraints OV = struct(Min=-2,Max=2); % Output constraints mpcobj = mpc(plant,Ts,p,m,Weights,MV,OV);
Configure and Simulate MPC Controller Block Inside Function-Call Subsystem
Function-Call subsystem is invoked directly by another block during simulation. If you invoke the Function-Call subsystem periodically with the same sample time specified in the MPC controller object then you get exactly the same behavior as an MPC controller block placed directly in a feedback loop with your plant, (without being in a subsystem) and that does not inherit its same sample time. If you must use a different sample time, then you should:
make sure that the manipulated variable rate (which depends on the last value of the manipulated variable) is handled correctly in the controller weights and constraints,
enable custom estimation instead of using built-in estimation, as the built-in estimator uses the sample time in the MPC object to provide a state estimate for the MPC optimization problem.
Open the model.
mdl1 = 'mpc_rtwdemo_functioncall';
open_system(mdl1)
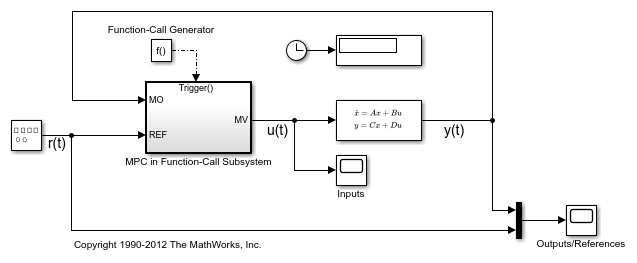
The reference signal is a sine wave with amplitude 1 and frequency of 0.4 Hz. The MPC Controller block is inside the MPC in Triggered Subsystem block.
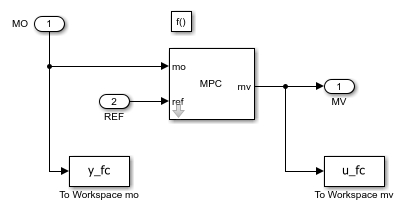
open_system([mdl1 '/MPC in Function-Call Subsystem'])
Configure the controller to use an inherited sample time. To do so, select the Inherit sample time property of the MPC Controller block.
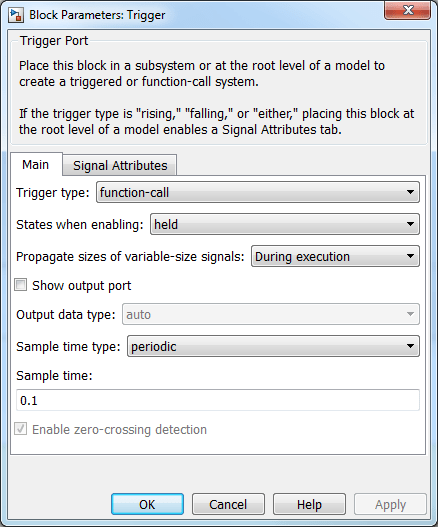
Invoke the Function-Call subsystem periodically with the correct sample time.
For this example, since the controller has a sample time of 0.1 seconds, configure the trigger block inside the Function-Call subsystem to use the same sample time.
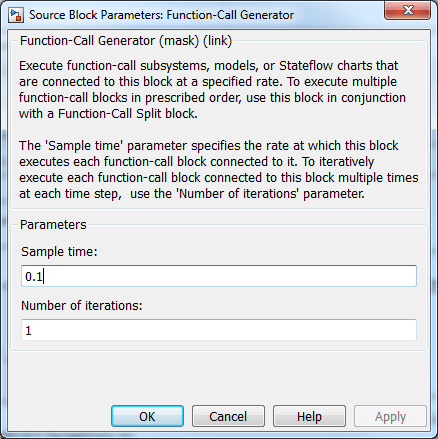
For this example, use the Function-Call Generator block to execute the Function-Call subsystem at the sample rate as 0.1 seconds.
Simulate the model.
close_system([mdl1 '/MPC in Function-Call Subsystem/MPC Controller']) open_system([mdl1 '/Inputs']) open_system([mdl1 '/Outputs//References']) sim(mdl1)
-->Converting model to discrete time. -->Integrator added as output disturbance model for measured output #1. -->"Model.Noise" is empty. Assuming white noise on each measured output.
The controller effort and the plant output are saved into base workspace (by the To Workspace blocks in the function call subsystem) as the variables u_fc and y_fc, respectively.
Close the Simulink® model.
bdclose(mdl1)
Configure and Simulate MPC Controller Block Inside Triggered Subsystem
Triggered subsystem executes each time a trigger event occurs. The same considerations on inheriting the sample time made earlier for the Function Call subsystem apply.
Open the model.
mdl2 = 'mpc_rtwdemo_triggered';
open_system(mdl2)
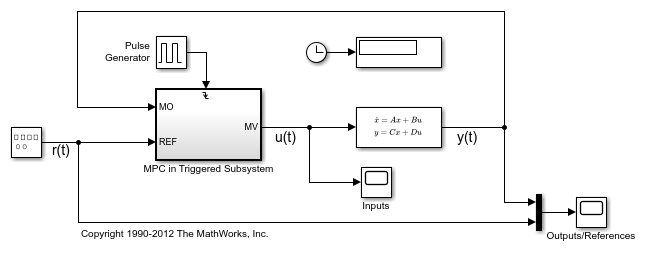
The MPC Controller block is in the MPC in Triggered Subsystem block.
open_system([mdl2 '/MPC in Triggered Subsystem']);
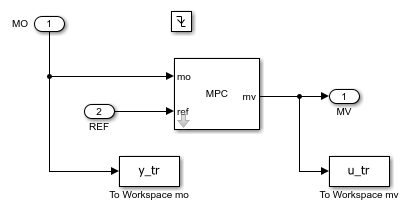
Configure the MPC block to use an inherited sample time, as you did for the function-call subsystem model.
Execute the Triggered subsystem periodically with the correct sample time.
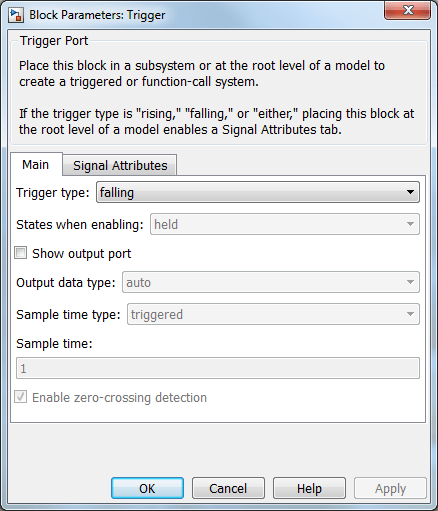
For this example, configure the Trigger block inside the triggered subsystem to use a falling trigger type.
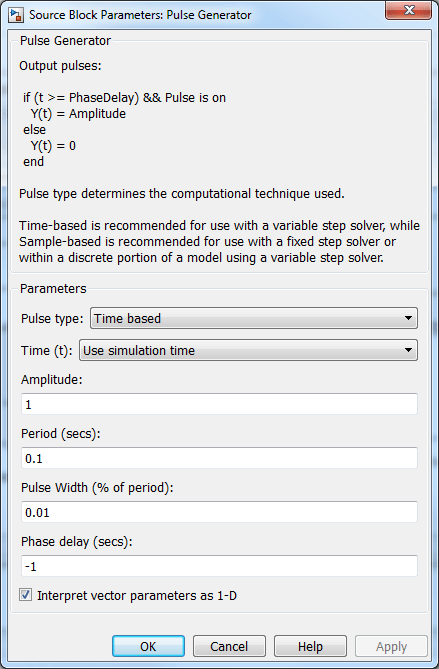
For this example, use the Pulse Generator block to provide a periodic triggering signal at the sample rate as 0.1 seconds.
Simulate the model.
close_system([mdl2 '/MPC in Triggered Subsystem/MPC Controller']) open_system([mdl2 '/Inputs']) open_system([mdl2 '/Outputs//References']) sim(mdl2)
The controller effort and the plant output are saved into base workspace (by the To Workspace blocks in the triggered subsystem) as the variables u_tr and y_tr, respectively.
Close the Simulink model.
bdclose(mdl2)
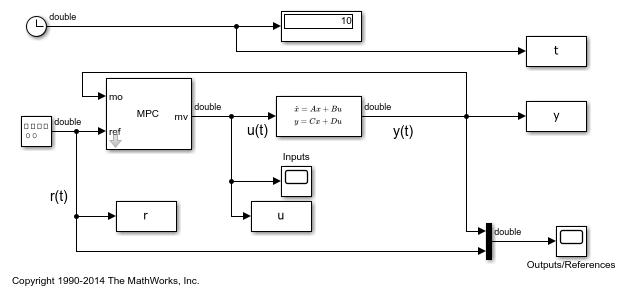
Compare Responses
Compare the simulation results from the Function-Call subsystem and the Triggered subsystem with the result generated by an MPC Controller block that is not placed inside a subsystem and does not inherit sample time.
mdl = 'mpc_rtwdemo';
open_system(mdl)
sim(mdl)
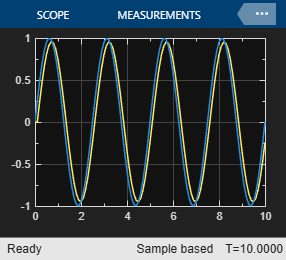
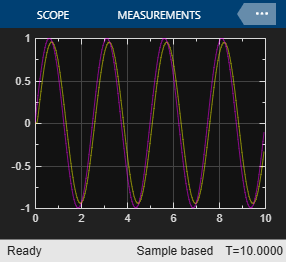
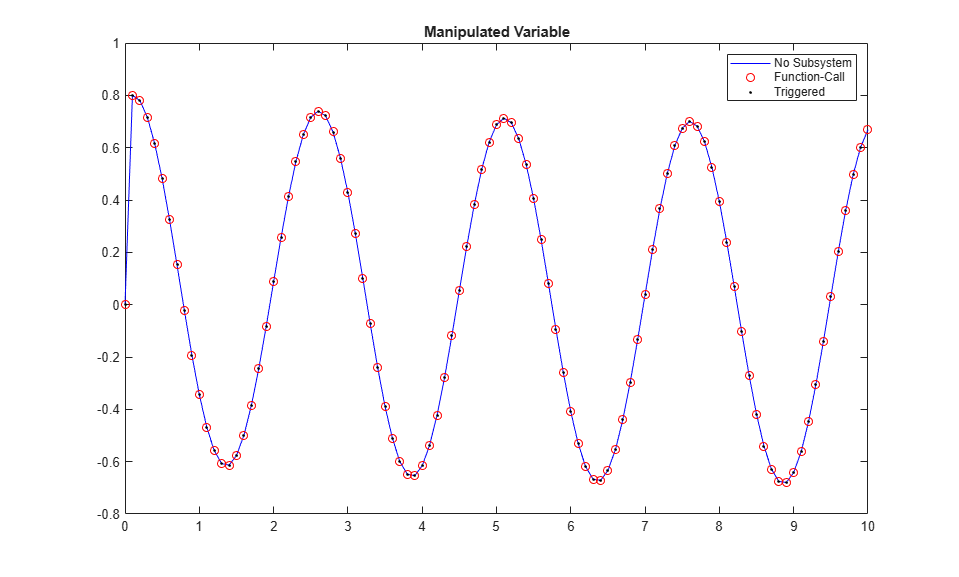
Compare the responses of the manipulated variable.
figure plot(t,u,'b-',t,u_fc,'ro',t(1:end-1),u_tr,'k.') title('Manipulated Variable') legend('No Subsystem','Function-Call','Triggered')
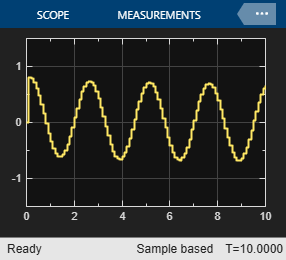
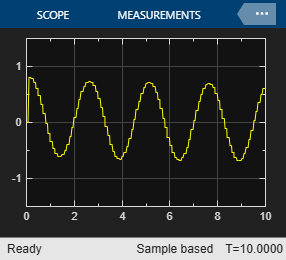
Compare the responses the plant output.
figure plot(t,y,'b-',t,y_fc,'ro',t(1:end-1),y_tr,'k.') title('Plant Output') legend('No Subsystem','Function-Call','Triggered')
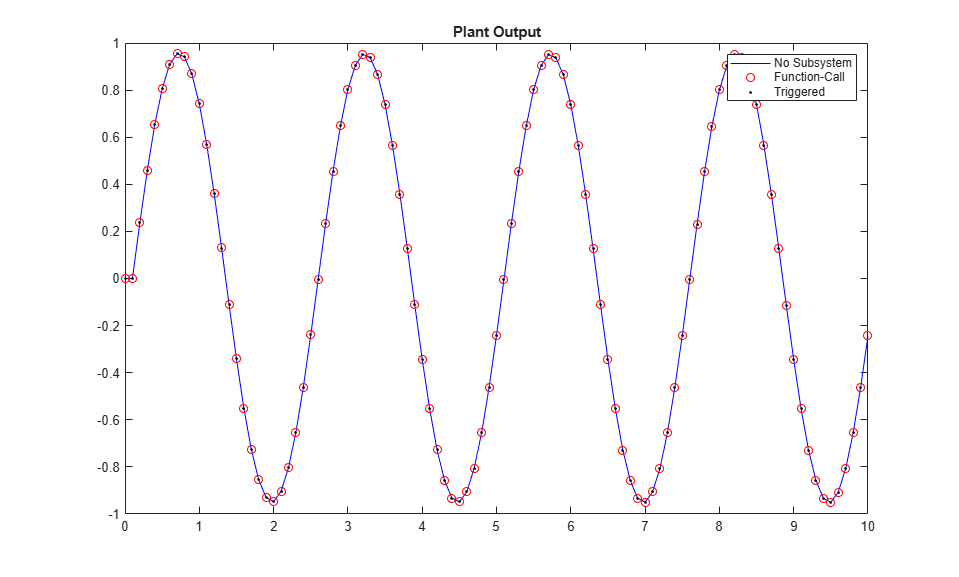
The results of all three models are numerically equal.
Close the Simulink model.
bdclose(mdl)
See Also
Objects
Blocks
- MPC Controller | Function-Call Subsystem (Simulink) | Triggered Subsystem (Simulink)