Estimate Transformation Between Two Point Clouds Using Features
This example shows how to estimate a rigid transformation between two point clouds. In the example, you use feature extraction and matching to significantly reduce the number of points required for estimation. After you use the extractFPFHFeatures function to extract fast point feature histogram (FPFH) features from the point clouds, you use the pcmatchfeatures function to search for matches in the extracted features. Finally, you use the estgeotform3d function and the matching features to estimate the rigid transformation.
Preprocessing
Create two point clouds by applying rigid transformation to an input point cloud.
Read the point cloud data into the workspace.
rng("default") ptCld = pcread("highwayScene.pcd"); ptCld.Count
ans = 65536
Downsample the point cloud to improve the computation speed, as it contains around 65,000 points.
ptCloud = pcdownsample(ptCld,gridAverage=0.2); ptCloud.Count
ans = 24596
Create a rigid transformation matrix with a 30-degree rotation and translation of 5 units in x- and *y-*axes.
rotAngle = 30; trans = [5 5 0]; tform = rigidtform3d([0 0 rotAngle],trans);
Transform the input point cloud.
ptCloudTformed = pctransform(ptCloud,tform);
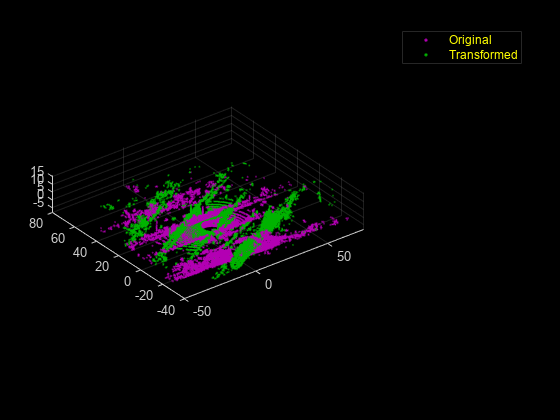
Visualize the two point clouds.
pcshowpair(ptCloud,ptCloudTformed) axis on xlim([-50 75]) ylim([-40 80]) legend("Original","Transformed",TextColor=[1 1 0])
Feature Extraction and Registration
Extract features from both the point clouds using the extractFPFHFeatures function.
fixedFeature = extractFPFHFeatures(ptCloud); movingFeature = extractFPFHFeatures(ptCloudTformed);
Find matching features and display the number of matching pairs.
[matchingPairs,scores] = pcmatchfeatures(fixedFeature,movingFeature, ... ptCloud,ptCloudTformed,Method="Exhaustive"); length(matchingPairs)
ans = 1814
Select matching points from the point clouds.
fixedPts = select(ptCloud,matchingPairs(:,1)); matchingPts = select(ptCloudTformed,matchingPairs(:,2));
Estimate the transformation matrix using the matching points.
estimatedTform = estgeotform3d(fixedPts.Location, ... matchingPts.Location,"rigid"); disp(estimatedTform.A)
0.8660 -0.5000 -0.0003 4.9995
0.5000 0.8660 0.0000 5.0022
0.0002 -0.0002 1.0000 0.0020
0 0 0 1.0000
Display the defined transformation matrix.
disp(tform.A)
0.8660 -0.5000 0 5.0000
0.5000 0.8660 0 5.0000
0 0 1.0000 0
0 0 0 1.0000
Use the estimated transformation to retransform ptCloudTformed back to the initial point cloud.
ptCloudTformed = pctransform(ptCloudTformed,invert(estimatedTform));
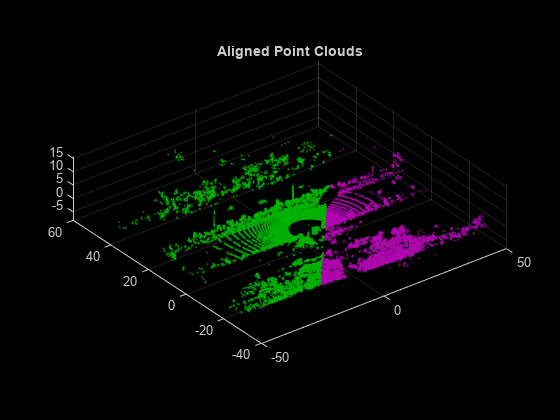
Visualize the two point clouds.
pcshowpair(ptCloud,ptCloudTformed) axis on xlim([-50 50]) ylim([-40 60]) title("Aligned Point Clouds")
See Also
extractFPFHFeatures | estgeotform3d | pcdownsample | pcmatchfeatures