undistortEgoMotion
Description
ptCloudOut = undistortEgoMotion(ptCloudIn,relTform,pointTimestamps,sweepTime)ptCloudIn, using the transformation
relTform, the timestamp of each point
pointTimestamps, and the lidar sweep time
sweepTime.
undistortEgoMotion undistorts a point cloud affected by the motion of the
sensor during the lidar sweep, assuming that the sensor sweeps at a constant speed when
collecting the point cloud data. To undistort the point cloud, the function transforms the
points in ptCloudIn back to where they would have been detected if the
lidar sensor had not moved while completing the lidar sweep.
Examples
Create a velodyneFileReader object, and read PCAP-formatted data into the workspace.
veloReader = velodyneFileReader("lidarData_ConstructionRoad.pcap","HDL32E");
Read the point cloud to undistort.
frameToUndistort = 38; prevPtCloud = readFrame(veloReader,frameToUndistort - 1); [ptCloud,pointTimestamps] = readFrame(veloReader,frameToUndistort);
Estimate the motion of the vehicle during the lidar sweep. The estimated motion can come from other sensors, such as an IMU or GPS. In this case, the estimated motion comes from point cloud registration.
gridStep = 1; relTform = pcregisterloam(ptCloud,prevPtCloud,gridStep);
Undistort the point cloud.
startTime = veloReader.Timestamps(frameToUndistort); endTime = veloReader.CurrentTime; undistortedPtCloud = undistortEgoMotion(ptCloud,relTform,pointTimestamps,[startTime endTime]);
Visualize the point cloud before and after motion compensation.
figure
pcshowpair(ptCloud,undistortedPtCloud)
view(2)
hold onVisualize where the Lidar sweep starts and ends with a red line.
plot3([0 0],[0 ptCloud.YLimits(2)],[0 0],"r",LineWidth=1)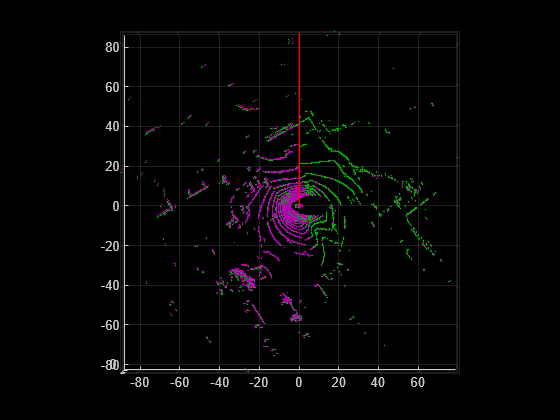
Input Arguments
Output Arguments
References
[1] Shoemake, Ken. " Animating Rotation with Quaternion Curves." ACM SIGGRAPH Computer Graphics 19, no. 3 (July 1985): 245–54.
Extended Capabilities
Version History
Introduced in R2023a