selectSubmap
Select submap within map
Description
Examples
Load a segment map from a MAT file into the workspace.
data = load('segmatchMapFullParkingLot.mat');
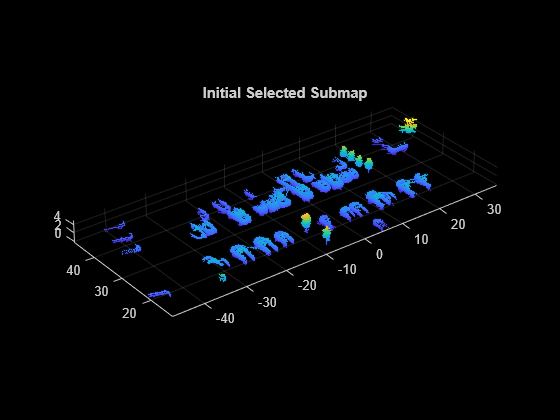
sMap = data.segmatchMapFullParkingLot;Visualize the currently selected submap.
figure show(sMap,'submap') title('Initial Selected Submap')
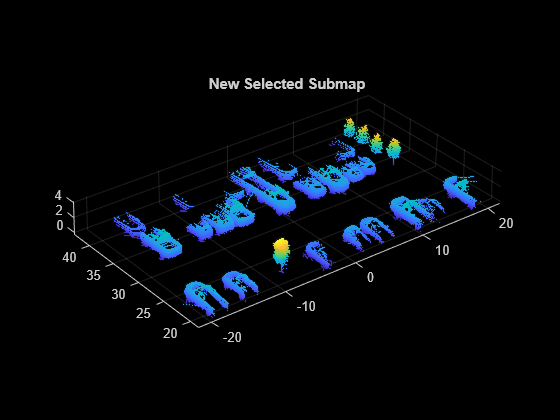
Select a new submap within the map.
center = [0 30 0]; sz = [40 25 10]; sMap = selectSubmap(sMap,center,sz);
Visualize the selected submap.
figure show(sMap,'submap') title('New Selected Submap')
Input Arguments
Output Arguments
Tips
Version History
Introduced in R2021a