addView
Add view to map
Description
Examples
Create a map representation to hold point cloud segments and features.
sMap = pcmapsegmatch('CentroidDistance',1);Load point cloud scans.
data = load('fullParkingLotData.mat');
ptCloudScans = data.fullParkingLotData;Set the radius to select a cylindrical neighborhood.
outerCylinderRadius = 30; innerCylinderRadius = 3;
Set the threshold parameters for segmentation.
distThreshold = 0.5; angleThreshold = 180;
Segment each point cloud and add the features and point cloud segments to the map.
for n = 1:numel(ptCloudScans); ptCloud = ptCloudScans(n); % Segment and remove the ground plane. groundPtsIdx = segmentGroundFromLidarData(ptCloud,'ElevationAngleDelta',11); ptCloud = select(ptCloud,~groundPtsIdx,'OutputSize','full'); % Select cylindrical neighborhood. dists = sqrt(ptCloud.Location(:,:,1).^2 + ptCloud.Location(:,:,2).^2); cylinderIdx = dists <= outerCylinderRadius ... & dists > innerCylinderRadius; ptCloud = select(ptCloud,cylinderIdx,'OutputSize','full'); % Segment the point cloud. [labels, numClusters] = segmentLidarData(ptCloud,distThreshold,angleThreshold,'NumClusterPoints',[50 5000]); % Extract features from the point cloud. [features,segments] = extractEigenFeatures(ptCloud,labels); % Add the features and segments to the map. sMap = addView(sMap,n,features,segments); end
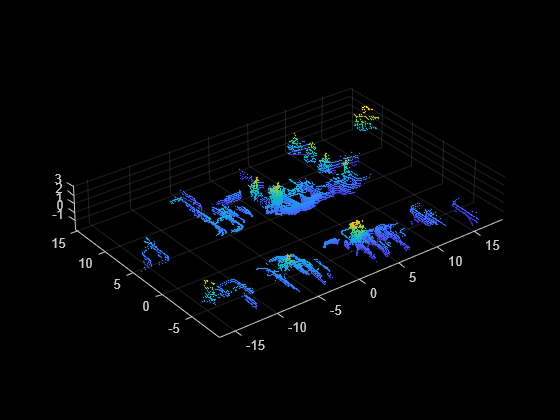
Display the map of segments.
figure; show(sMap);
Input Arguments
Output Arguments
Version History
Introduced in R2021a