rangefilt
Local range of image
Description
Examples
Read an image into the workspace.
I = imread('liftingbody.png'); Filter the image. The rangefilt function returns an array where each output pixel contains the range value (maximum value - minimum value) of the 3-by-3 neighborhood around the corresponding pixel in the input image.
J = rangefilt(I);
Display the original image and the filtered image side-by-side.
imshowpair(I,J,'montage')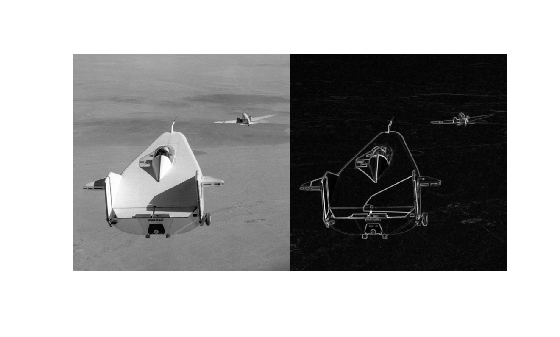
This example shows how to detect regions of texture in an image using the texture filter functions.
Read an image into the workspace and display it. In the figure, the background is smooth—there is very little variation in the gray-level values. In the foreground, the surface contours of the coins exhibit more texture. In this image, foreground pixels have more variability and thus higher range values.
I = imread('eight.tif');
imshow(I)
Filter the image with the rangefilt function and display the results. Range filtering makes the edges and contours of the coins visible.
K = rangefilt(I); figure imshow(K)

Read an image into the workspace, and display it.
I = imread('circuit.tif');
imshow(I);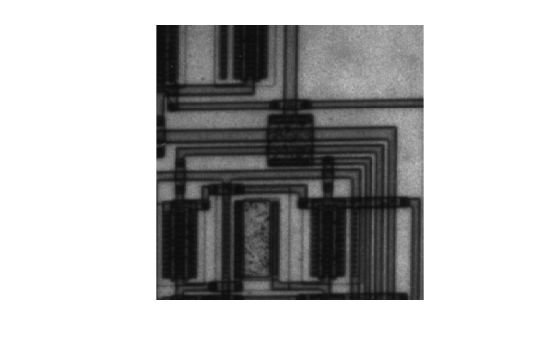
Define a neighborhood. In this example, the neighborhood returns a large value when there is a large difference between pixel values to the left and right of an input pixel. The filtering does not consider pixels above and blow the input pixel. Thus, this neighborhood emphasizes vertical edges.
nhood = [1 1 1];
Perform the range filtering operation using this neighborhood. For comparison, also perform range filtering using the default 3-by-3 neighborhood. Compare the results.
J = rangefilt(I,nhood); K = rangefilt(I); figure imshowpair(J,K,'montage'); title('Range filtering using specified neighborhood (left) and default neighborhood (right)');

The result using the specified neighborhood emphasizes vertical edges, as expected. In comparison, the default filter is not sensitive to edge directionality.
Input Arguments
Output Arguments
Algorithms
The following figure shows how the value of element B(2,4) was
calculated from A(2,4). By default, the
rangefilt function uses a 3-by-3 neighborhood but you can
specify neighborhoods of different shapes and sizes.
Determining Pixel Values in Range Filtered Output Image
rangefilt uses the morphological functions imdilate and imerode to determine the maximum and
minimum values in the specified neighborhood. Consequently,
rangefilt uses the padding behavior of these morphological
functions.