Hydraulic Double-Acting Valve Actuator
(To be removed) Double-acting hydraulic valve actuator
The Hydraulics (Isothermal) library will be removed in a future release. Use the Isothermal Liquid library instead.
For more information on updating your models, see Upgrading Hydraulic Models to Use Isothermal Liquid Blocks.
Library
Valve Actuators

Description
Use the Hydraulic Double-Acting Valve Actuator block as a pilot actuator for directional, pressure, or flow control valves in applications where all the forces, except spring force, and flow consumption can be neglected. The actuator consists of two single-acting actuators acting against each other. Each single-acting actuator consists of a piston, centering spring, and centering washer. When control pressure is applied to either hydraulic port, only one centering spring is compressed by its washer while the other butts against the valve body and exerts no force on the spool. When both control pressures are released, the springs force the washers against the valve body, and the spool centers between them. This design allows each actuator to have a different spring, preload force, and piston area.

As pressure applied to the piston develops enough force to overcome the spring preload, the
piston moves to the opposite position until it reaches its maximum stroke. Pressure applied at
port X shifts the valve in the x-direction, overcoming the spring
located in the Y chamber. Pressure applied at port Y shifts the valve in the
y-direction, overcoming the spring located in the X chamber.
The actuator is simulated according to the following equations:
If F >= 0,
If F < 0,
where
| F | Force acting on the valve |
| s | Piston displacement |
| px | Pressure in the actuator X chamber |
| py | Pressure in the actuator Y chamber |
| Ax | Valve face area in the X chamber |
| Ay | Valve face area in the Y chamber |
| strx | Valve stroke in x-direction |
| stry | Valve stroke in y-direction |
| Fprx | Chamber X spring preload force |
| Fmaxx | Chamber X spring maximum force |
| Fpry | Chamber Y spring preload force |
| Fmaxy | Chamber Y spring maximum force |
| or | Actuator orientation with respect to the globally assigned positive direction. If pressure applied at port X moves the piston in positive direction, or equals 1. If pressure applied at port X moves the piston in negative direction, or equals –1. |
Connections X and Y are hydraulic conserving ports associated with the valve chambers. Connection P is a physical signal port whose output corresponds to piston displacement. Pressure applied at port X moves the piston in the positive or negative direction depending on the value of the Actuator orientation parameter.
Basic Assumptions and Limitations
The flow consumption associated with the valve motion is assumed to be negligible.
The inertia, friction, and hydraulic axial forces are assumed to be small and are not taken into account.
The clearances between the valve and the washers are not taken into account.
Parameters
- Piston area at port X
Effective piston area at port X. The parameter value must be greater than zero. The default value is
2e-4m^2.- Piston area at port Y
Effective piston area at port Y. The parameter value must be greater than zero. The default value is
2e-4m^2.- Preload force at port X
Spring preload force at port X. The default value is
0.- Preload force at port Y
Spring preload force at port Y. The default value is
0.- Spring maximum force at port X
Chamber X spring maximum force. The parameter value must be greater than the spring preload force. The default value is
50N.- Spring maximum force at port Y
Chamber Y spring maximum force. The parameter value must be greater than the spring preload force. The default value is
50N.- Piston stroke at port X
Piston stroke in chamber X. The parameter value must be greater than or equal to zero. The default value is
5e-3m.- Piston stroke at port Y
Piston stroke in chamber Y. The parameter value must be greater than or equal to zero. The default value is
5e-3m.- Actuator orientation
Specifies actuator orientation with respect to the globally assigned positive direction. The actuator can be installed in two different ways, depending upon whether it moves the piston in the positive or in the negative direction when pressure is applied at its inlet. If pressure applied at port X moves the piston in the negative direction, set the parameter to
Acts in negative direction. The default value isActs in positive direction.
Ports
The block has the following ports:
XHydraulic conserving port associated with the valve X chamber.
YHydraulic conserving port associated with the valve Y chamber.
PPhysical signal port that outputs piston displacement.
Examples
The following illustration shows a typical control unit of a variable-displacement pump that provides load sensing and pressure limiting (see [1]). In the unit, the load-sensing compensator varies the pump displacement to maintain a preset pressure differential across the variable orifice, while the pressure-limiting compensator does not allow the pump pressure to exceed the pressure limit.
The Hydraulic Motor Driven by Load-Sensing Variable-Displacement Pump example implements this type of control. The next illustration shows the schematic of the Control block in the example model.
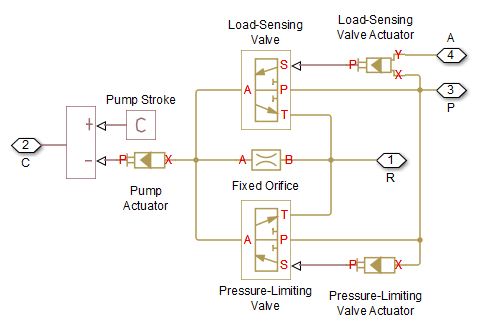
There are three hydraulic valve actuators in the model:
Pressure-Limiting Valve Actuator — A single-acting actuator that controls the Pressure-Limiting Valve.
Pump Actuator — A single-acting valve actuator that acts on the pump displacement control device (yoke control).
Load-Sensing Valve Actuator — A double-acting valve actuator that controls the Load-Sensing Valve. Its output is proportional to the difference between the pump pressure (port P) and the load pressure (port A).
Open the example model to see the parameter settings for the blocks.
References
[1] F. Yeapple, Fluid Power Design Handbook, Marcel Dekker, Inc., 1995