patternsearch
Find minimum of function using pattern search
Syntax
Description
x = patternsearch(fun,x0)x, to the function handle fun that
computes the values of the objective function. x0 is
a real vector specifying an initial point for the pattern search algorithm.
Note
Passing Extra Parameters explains how to pass extra parameters to the objective function and nonlinear constraint functions, if necessary.
x = patternsearch(fun,x0,A,b,Aeq,beq,lb,ub)x,
so that the solution is always in the range lb ≤ x ≤ ub.
If no linear equalities exist, set Aeq = [] and beq
= []. If x(i) has no lower bound, set lb(i)
= -Inf. If x(i) has no upper bound, set ub(i)
= Inf.
x = patternsearch(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)nonlcon. The
function nonlcon accepts x and returns vectors
ineqnonlin and eqnonlin, representing the
nonlinear inequalities and equalities respectively. patternsearch
optimizes fun such that
ineqnonlin(x) ≤ 0 and
eqnonlin(x) = 0. If no bounds exist, set lb =
[], ub = [], or both.
Examples
Minimize an unconstrained problem using the patternsearch solver.
Create the following two-variable objective function. On your MATLAB® path, save the following code to a file named psobj.m.
function y = psobj(x)
y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2)));
Set the objective function to @psobj.
fun = @psobj;
Find the minimum, starting at the point [0,0].
x0 = [0,0]; x = patternsearch(fun,x0)
patternsearch stopped because the mesh size was less than options.MeshTolerance. x = -0.7037 -0.1860
Minimize a function subject to some linear inequality constraints.
Create the following two-variable objective function. On your MATLAB® path, save the following code to a file named psobj.m.
function y = psobj(x)
y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2)));
Set the objective function to @psobj.
fun = @psobj;
Set the two linear inequality constraints.
A = [-3,-2;
-4,-7];
b = [-1;-8];
Find the minimum, starting at the point [0.5,-0.5].
x0 = [0.5,-0.5]; x = patternsearch(fun,x0,A,b)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x =
5.2827 -1.8758
Find the minimum of a function that has only bound constraints.
Create the following two-variable objective function. On your MATLAB® path, save the following code to a file named psobj.m.
function y = psobj(x)
y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2)));
Set the objective function to @psobj.
fun = @psobj;
Find the minimum when  and
and  .
.
lb = [0,-Inf]; ub = [Inf,-3]; A = []; b = []; Aeq = []; beq = [];
Find the minimum, starting at the point [1,-5].
x0 = [1,-5]; x = patternsearch(fun,x0,A,b,Aeq,beq,lb,ub)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x =
0.1880 -3.0000
Find the minimum of a function subject to a nonlinear inequality constraint.
Create the following two-variable objective function.
function y = psobj(x) y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2))); end
Set the objective function to @psobj.
fun = @psobj;
Create the nonlinear constraint
function [ineqnonlin,eqnonlin] = ellipsetilt(x) eqnonlin = []; ineqnonlin = x(1)*x(2)/2 + (x(1)+2)^2 + (x(2)-2)^2/2 - 2; end
Start patternsearch from the initial point [-2,-2].
x0 = [-2,-2]; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = @ellipsetilt; x = patternsearch(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon)
Optimization finished: mesh size less than options.MeshTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
-1.5144 0.0875
Sometimes the different patternsearch algorithms have noticeably different behavior. While it can be difficult to predict which algorithm works best for a problem, you can easily try different algorithms. For this example, use the sawtoothxy objective function, which is available when you run this example, and which is described and plotted in Find Global or Multiple Local Minima.
type sawtoothxyfunction f = sawtoothxy(x,y)
[t r] = cart2pol(x,y); % change to polar coordinates
h = cos(2*t - 1/2)/2 + cos(t) + 2;
g = (sin(r) - sin(2*r)/2 + sin(3*r)/3 - sin(4*r)/4 + 4) ...
.*r.^2./(r+1);
f = g.*h;
end
To see the behavior of the different algorithms when minimizing this objective function, set some asymmetric bounds. Also set an initial point x0 that is far from the true solution sol = [0 0], where sawtoothxy(0,0) = 0.
rng default
x0 = 12*randn(1,2);
lb = [-15,-26];
ub = [26,15];
fun = @(x)sawtoothxy(x(1),x(2));Minimize the sawtoothxy function using the "classic" patternsearch algorithm.
optsc = optimoptions("patternsearch",Algorithm="classic"); [sol,fval,eflag,output] = patternsearch(fun,... x0,[],[],[],[],lb,ub,[],optsc)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
sol = 1×2
10-5 ×
0.9825 0
fval = 1.3278e-09
eflag = 1
output = struct with fields:
function: @(x)sawtoothxy(x(1),x(2))
problemtype: 'boundconstraints'
pollmethod: 'gpspositivebasis2n'
maxconstraint: 0
searchmethod: []
iterations: 52
funccount: 168
meshsize: 9.5367e-07
rngstate: [1×1 struct]
message: 'patternsearch stopped because the mesh size was less than options.MeshTolerance.'
The "classic" algorithm reaches the global solution in 52 iterations and 168 function evaluations.
Try the "nups" algorithm.
rng default % For reproducibility optsn = optimoptions("patternsearch",Algorithm="nups"); [sol,fval,eflag,output] = patternsearch(fun,... x0,[],[],[],[],lb,ub,[],optsn)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
sol = 1×2
6.3204 15.0000
fval = 85.9256
eflag = 1
output = struct with fields:
function: @(x)sawtoothxy(x(1),x(2))
problemtype: 'boundconstraints'
pollmethod: 'nups'
maxconstraint: 0
searchmethod: []
iterations: 29
funccount: 88
meshsize: 7.1526e-07
rngstate: [1×1 struct]
message: 'patternsearch stopped because the mesh size was less than options.MeshTolerance.'
This time the solver reaches a local solution in just 29 iterations and 88 function evaluations, but the solution is not the global solution.
Try using the "nups-mads" algorithm, which takes no steps in the coordinate directions.
rng default % For reproducibility optsm = optimoptions("patternsearch",Algorithm="nups-mads"); [sol,fval,eflag,output] = patternsearch(fun,... x0,[],[],[],[],lb,ub,[],optsm)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
sol = 1×2
10-4 ×
-0.5275 0.0806
fval = 1.5477e-08
eflag = 1
output = struct with fields:
function: @(x)sawtoothxy(x(1),x(2))
problemtype: 'boundconstraints'
pollmethod: 'nups-mads'
maxconstraint: 0
searchmethod: []
iterations: 55
funccount: 189
meshsize: 9.5367e-07
rngstate: [1×1 struct]
message: 'patternsearch stopped because the mesh size was less than options.MeshTolerance.'
This time, the solver reaches the global solution in 55 iterations and 189 function evaluations, which is similar to the 'classic' algorithm.
Create the following two-variable objective function.
function y = psobj(x) y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2))); end
Set the objective function to @psobj.
fun = @psobj;
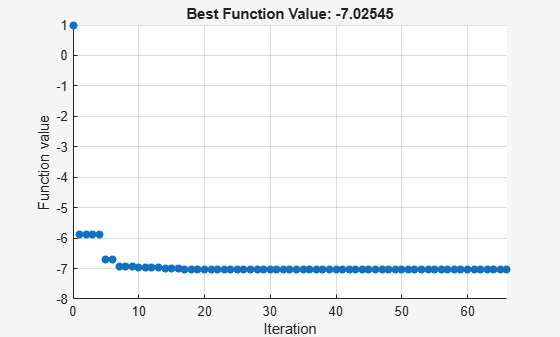
Set options to give iterative display and to plot the objective function at each iteration.
options = optimoptions("patternsearch",... Display="iter",... PlotFcn=@psplotbestf);
Find the unconstrained minimum of the objective starting from the point [0,0].
x0 = [0,0]; A = []; b = []; Aeq = []; beq = []; lb = []; ub = []; nonlcon = []; x = patternsearch(fun,x0,A,b,Aeq,beq,lb,ub,nonlcon,options)
Iter Func-count f(x) MeshSize Method
0 1 1 1
1 4 -5.88607 2 Successful Poll
2 8 -5.88607 1 Refine Mesh
3 12 -5.88607 0.5 Refine Mesh
4 16 -5.88607 0.25 Refine Mesh
5 17 -6.69495 0.5 Successful Poll
6 21 -6.69495 0.25 Refine Mesh
7 25 -6.94245 0.5 Successful Poll
8 29 -6.94245 0.25 Refine Mesh
9 33 -6.94245 0.125 Refine Mesh
10 35 -6.97247 0.25 Successful Poll
11 39 -6.97247 0.125 Refine Mesh
12 43 -6.97247 0.0625 Refine Mesh
13 44 -6.97947 0.125 Successful Poll
14 48 -6.98654 0.25 Successful Poll
15 52 -6.98654 0.125 Refine Mesh
16 56 -6.98654 0.0625 Refine Mesh
17 58 -7.02187 0.125 Successful Poll
18 62 -7.02187 0.0625 Refine Mesh
19 66 -7.02187 0.03125 Refine Mesh
20 69 -7.02215 0.0625 Successful Poll
21 73 -7.02215 0.03125 Refine Mesh
22 77 -7.02215 0.01562 Refine Mesh
23 78 -7.02542 0.03125 Successful Poll
24 82 -7.02542 0.01562 Refine Mesh
25 86 -7.02542 0.007812 Refine Mesh
26 90 -7.02542 0.003906 Refine Mesh
27 94 -7.02542 0.001953 Refine Mesh
28 96 -7.02544 0.003906 Successful Poll
29 100 -7.02544 0.001953 Refine Mesh
30 104 -7.02544 0.0009766 Refine Mesh
Iter Func-count f(x) MeshSize Method
31 107 -7.02544 0.001953 Successful Poll
32 111 -7.02544 0.0009766 Refine Mesh
33 115 -7.02544 0.0004883 Refine Mesh
34 116 -7.02545 0.0009766 Successful Poll
35 120 -7.02545 0.0004883 Refine Mesh
36 124 -7.02545 0.0009766 Successful Poll
37 128 -7.02545 0.0004883 Refine Mesh
38 132 -7.02545 0.0002441 Refine Mesh
39 136 -7.02545 0.0001221 Refine Mesh
40 140 -7.02545 6.104e-05 Refine Mesh
41 142 -7.02545 0.0001221 Successful Poll
42 146 -7.02545 6.104e-05 Refine Mesh
43 149 -7.02545 0.0001221 Successful Poll
44 153 -7.02545 6.104e-05 Refine Mesh
45 157 -7.02545 3.052e-05 Refine Mesh
46 161 -7.02545 1.526e-05 Refine Mesh
47 162 -7.02545 3.052e-05 Successful Poll
48 166 -7.02545 1.526e-05 Refine Mesh
49 170 -7.02545 3.052e-05 Successful Poll
50 174 -7.02545 1.526e-05 Refine Mesh
51 178 -7.02545 7.629e-06 Refine Mesh
52 181 -7.02545 1.526e-05 Successful Poll
53 185 -7.02545 7.629e-06 Refine Mesh
54 187 -7.02545 1.526e-05 Successful Poll
55 191 -7.02545 7.629e-06 Refine Mesh
56 195 -7.02545 3.815e-06 Refine Mesh
57 196 -7.02545 7.629e-06 Successful Poll
58 200 -7.02545 1.526e-05 Successful Poll
59 204 -7.02545 7.629e-06 Refine Mesh
60 208 -7.02545 3.815e-06 Refine Mesh
Iter Func-count f(x) MeshSize Method
61 210 -7.02545 7.629e-06 Successful Poll
62 214 -7.02545 3.815e-06 Refine Mesh
63 218 -7.02545 1.907e-06 Refine Mesh
64 221 -7.02545 3.815e-06 Successful Poll
65 225 -7.02545 1.907e-06 Refine Mesh
66 229 -7.02545 9.537e-07 Refine Mesh
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x = 1×2
-0.7037 -0.1860
Find a minimum value of a function and report both the location and value of the minimum.
Create the following two-variable objective function. On your MATLAB® path, save the following code to a file named psobj.m.
function y = psobj(x)
y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2)));
Set the objective function to @psobj.
fun = @psobj;
Find the unconstrained minimum of the objective, starting from the point [0,0]. Return both the location of the minimum, x, and the value of fun(x).
x0 = [0,0]; [x,fval] = patternsearch(fun,x0)
patternsearch stopped because the mesh size was less than options.MeshTolerance. x = -0.7037 -0.1860 fval = -7.0254
To examine the patternsearch solution process, obtain all outputs.
Create the following two-variable objective function. On your MATLAB® path, save the following code to a file named psobj.m.
function y = psobj(x)
y = exp(-x(1)^2-x(2)^2)*(1+5*x(1) + 6*x(2) + 12*x(1)*cos(x(2)));
Set the objective function to @psobj.
fun = @psobj;
Find the unconstrained minimum of the objective, starting from the point [0,0]. Return the solution, x, the objective function value at the solution, fun(x), the exit flag, and the output structure.
x0 = [0,0]; [x,fval,exitflag,output] = patternsearch(fun,x0)
patternsearch stopped because the mesh size was less than options.MeshTolerance.
x =
-0.7037 -0.1860
fval =
-7.0254
exitflag =
1
output =
struct with fields:
function: @psobj
problemtype: 'unconstrained'
pollmethod: 'gpspositivebasis2n'
maxconstraint: []
searchmethod: []
iterations: 66
funccount: 229
meshsize: 9.5367e-07
rngstate: [1×1 struct]
message: 'patternsearch stopped because the mesh size was less than options.MeshTolerance.'
The exitflag is 1, indicating convergence to a local minimum.
The output structure includes information such as how many iterations patternsearch took, and how many function evaluations. Compare this output structure with the results from Pattern Search with Nondefault Options. In that example, you obtain some of this information, but did not obtain, for example, the number of function evaluations.
Input Arguments
Output Arguments
Algorithms
By default and in the absence of linear constraints, patternsearch looks
for a minimum based on an adaptive mesh that is aligned with the coordinate directions. See
What Is Direct Search? and How Pattern Search Polling Works.
When you set the Algorithm option to "nups" or one
of its variants, patternsearch uses the algorithm described in Nonuniform Pattern Search (NUPS) Algorithm. This algorithm is different
from the default algorithm in several ways; for example, it has fewer options to
set.
Alternative Functionality
App
The Optimize Live Editor task provides a visual interface for patternsearch.
References
[1] Audet, Charles, and J. E. Dennis Jr. “Analysis of Generalized Pattern Searches.” SIAM Journal on Optimization. Volume 13, Number 3, 2003, pp. 889–903.
[2] Conn, A. R., N. I. M. Gould, and Ph. L. Toint. “A Globally Convergent Augmented Lagrangian Barrier Algorithm for Optimization with General Inequality Constraints and Simple Bounds.” Mathematics of Computation. Volume 66, Number 217, 1997, pp. 261–288.
[3] Abramson, Mark A. Pattern Search Filter Algorithms for Mixed Variable General Constrained Optimization Problems. Ph.D. Thesis, Department of Computational and Applied Mathematics, Rice University, August 2002.
[4] Abramson, Mark A., Charles Audet, J. E. Dennis, Jr., and Sebastien Le Digabel. “ORTHOMADS: A deterministic MADS instance with orthogonal directions.” SIAM Journal on Optimization. Volume 20, Number 2, 2009, pp. 948–966.
[5] Kolda, Tamara G., Robert Michael Lewis, and Virginia Torczon. “Optimization by direct search: new perspectives on some classical and modern methods.” SIAM Review. Volume 45, Issue 3, 2003, pp. 385–482.
[6] Kolda, Tamara G., Robert Michael Lewis, and Virginia Torczon. “A generating set direct search augmented Lagrangian algorithm for optimization with a combination of general and linear constraints.” Technical Report SAND2006-5315, Sandia National Laboratories, August 2006.
[7] Lewis, Robert Michael, Anne Shepherd, and Virginia Torczon. “Implementing generating set search methods for linearly constrained minimization.” SIAM Journal on Scientific Computing. Volume 29, Issue 6, 2007, pp. 2507–2530.
Extended Capabilities
Version History
Introduced before R2006a
See Also
ga | optimoptions | paretosearch | Optimize
Topics
- Optimize Using the GPS Algorithm
- Coding and Minimizing an Objective Function Using Pattern Search
- Constrained Minimization Using Pattern Search, Solver-Based
- Effects of Pattern Search Options
- Optimize ODEs in Parallel
- Pattern Search Climbs Mount Washington
- Optimization Workflow
- What Is Direct Search?
- Pattern Search Terminology
- How Pattern Search Polling Works
- Use Complete Poll in Pattern Search
- Search and Poll