assignTOMHT
Track-oriented multi-hypotheses tracking assignment
Description
[
returns a table of assignments, assignments,unassignedrows,unassignedcolumns] = assignTOMHT(costmatrix,costThreshold)assignments, of detections to tracks
using a track-oriented multi-hypothesis (TOMHT) algorithm.
The cost of each potential assignment is contained in the cost
matrix, costmatrix. Each matrix entry represents the cost of a possible
assignments. Matrix rows represent tracks and columns represent detections. All possible
assignments are represented in the cost matrix. The lower the cost, the more likely the
assignment is to be made. Each track can be assigned to at most one detection and each detection
can be assigned to at most one track. If the number of rows is greater than the number of
columns, some tracks are unassigned. If the number of columns is greater than the number of
rows, some detections are unassigned. You can set an entry of costmatrix to
Inf to prohibit an assignment.
costThreshold represents the set of three gates used for assigning
detections to tracks.
The function returns a list of unassigned tracks, unassignedrows,
and a list of unassigned detections, unassignedcolumns.
Examples
Input Arguments
Output Arguments
Algorithms
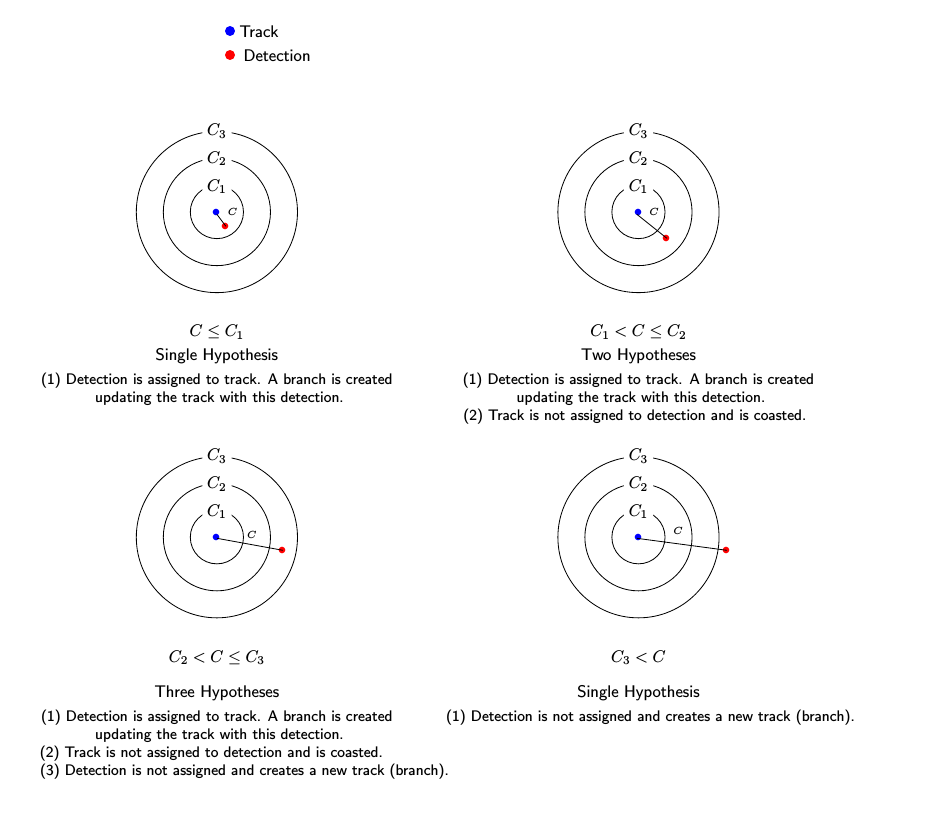
Three assignment thresholds, C1 , C2, and C3, control (1) the assignment of a detection to a track, (2) the creation of a new branch from a detection, and (3) the creation of a new branch from an unassigned track. The threshold values must satisfy: C1 <= C2 <= C3.
If the cost of an assignment is C = costmatrix(i,j), the following
hypotheses are created based on comparing the cost to the values of the assignment
thresholds. Below each comparison, there is a list of the possible hypotheses.
Tips:
Increase the value of C3 if there are detections that should be assigned to tracks but are not. Decrease the value if there are detections that are assigned to tracks they should not be assigned to (too far away).
Increasing the values C1 and C2 helps control the number of track branches that are created. However, doing so reduces the number of branches (hypotheses) each track has.
To allow each track to be unassigned, set C1 = 0.
To allow each detection to be unassigned, set C2 = 0.
References
[1] Werthmann, J. R.. "A Step-by-Step Description of a Computationally Efficient Version of Multiple Hypothesis Tracking." International Society for Optics and Photonics, Vol. 1698, pp. 228-301, 1992.
Extended Capabilities
Version History
Introduced in R2018b