graphplot
Plot Markov chain directed graph
Description
graphplot( creates a plot of the directed graph (digraph) of the discrete-time Markov chain mc)mc. Nodes correspond to the states of mc. Directed edges correspond to nonzero transition probabilities in the transition matrix mc.P.
graphplot(
uses additional
options specified by one or more name-value arguments. Options include highlighting transition probabilities, communicating classes, and specifying class properties of recurrence/transience and period. Also, you can plot the condensed digraph instead, with communicating classes as supernodes.mc,Name,Value)
graphplot(
plots on the axes specified by ax,___)ax instead of the current axes (gca) using any of the input argument combinations in the previous syntaxes. The option ax can precede any of the input argument combinations in the previous syntaxes.
Examples
Consider this theoretical, right-stochastic transition matrix of a stochastic process.
Create the Markov chain that is characterized by the transition matrix P.
P = [ 0 0 1/2 1/4 1/4 0 0 ;
0 0 1/3 0 2/3 0 0 ;
0 0 0 0 0 1/3 2/3;
0 0 0 0 0 1/2 1/2;
0 0 0 0 0 3/4 1/4;
1/2 1/2 0 0 0 0 0 ;
1/4 3/4 0 0 0 0 0 ];
mc = dtmc(P);Plot a directed graph of the Markov chain.
figure; graphplot(mc);

Consider this theoretical, right-stochastic transition matrix of a stochastic process.
Create the Markov chain that is characterized by the transition matrix P. Name the states Regime 1 through Regime 4.
P = [0.5 0.5 0 0; 0.5 0 0.5 0; 0 0 0 1; 0 0 1 0]; mc = dtmc(P,'StateNames',["Regime 1" "Regime 2" "Regime 3" "Regime 4"]);
Plot a directed graph of the Markov chain. Identify the communicating classes in the digraph and color the edges according to the probability of transition.
figure; graphplot(mc,'ColorNodes',true,'ColorEdges',true)
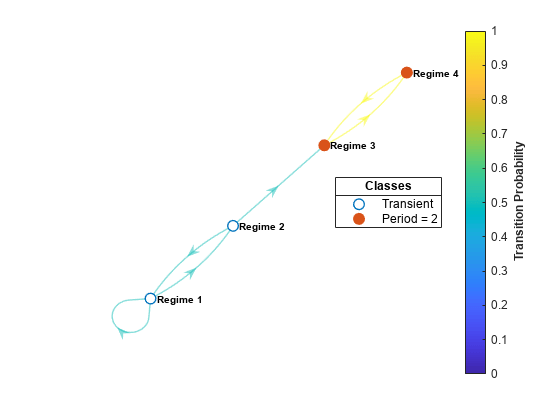
States 3 and 4 compose a communicating class with period 2. States 1 and 2 are transient.
Create a "dumbbell" Markov chain containing 10 states in each "weight" and three states in the "bar."
Specify random transition probabilities between states within each weight.
If the Markov chain reaches the state in a weight that is closest to the bar, then specify a high probability of transitioning to the bar.
Specify uniform transitions between states in the bar.
rng(1); % For reproducibility w = 10; % Dumbbell weights DBar = [0 1 0; 1 0 1; 0 1 0]; % Dumbbell bar DB = blkdiag(rand(w),DBar,rand(w)); % Transition matrix % Connect dumbbell weights and bar DB(w,w+1) = 1; DB(w+1,w) = 1; DB(w+3,w+4) = 1; DB(w+4,w+3) = 1; db = dtmc(DB);
Plot a directed graph of the Markov chain. Return the plot handle.
figure; h = graphplot(db);

Observe that the state labels are difficult to read. Remove the labels entirely.
h.NodeLabel = {};
Input Arguments
Name-Value Arguments
Output Arguments
Tips
To produce the directed graph as a MATLAB®
digraphobject and use additional functions of that object, enter:G = digraph(mc.P)
For readability, the
'LabelNodes'name-value pair argument allows you to turn off lengthy node labels and replace them with node numbers. To remove node labels completely, seth.NodeLabel = {};.To compute node information on communicating classes and their properties, use
classify.To extract a communicating class in the graph, use
subchain.The condensed graph is useful for:
Identifying transient classes (supernodes with positive outdegree)
Identifying recurrent classes (supernodes with zero outdegree)
Visualizing the overall structure of unichains (chains with a single recurrent class and any transient classes that transition into it)
References
[1] Gallager, R.G. Stochastic Processes: Theory for Applications. Cambridge, UK: Cambridge University Press, 2013.
[2] Horn, R., and C. R. Johnson. Matrix Analysis. Cambridge, UK: Cambridge University Press, 1985.
[3] Jarvis, J. P., and D. R. Shier. "Graph-Theoretic Analysis of Finite Markov Chains." In Applied Mathematical Modeling: A Multidisciplinary Approach. Boca Raton: CRC Press, 2000.
Version History
Introduced in R2017b