3DOF Acceleration
Libraries:
Aerospace Blockset /
Equations of Motion /
Acceleration
Description
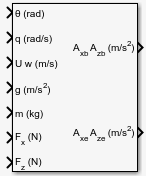
The 3DOF Acceleration block computes the acceleration of a body in three-degrees-of-freedom motion with respect to body-fixed coordinate frame and inertial (flat Earth) coordinate frame.
To compute the acceleration for equations of motions blocks:
Select Output mass properties for acceleration computation.
Feed signals from the matching output ports of the associated 3DOF equation of motion block into the associated input ports of 3DOF Acceleration.
Tip
Match all the parameter values for 3DOF Acceleration and the 3DOF equations of motion blocks.
Ports
Input
Output
Parameters
Version History
Introduced in R2025a