Statistiken
2 Dateien
Blogs16 Beiträge
RANG
N/A
of 289.998
REPUTATION
N/A
BEITRÄGE
0 Fragen
0 Antworten
ANTWORTZUSTIMMUNG
0.00%
ERHALTENE STIMMEN
0
RANG
2.843 of 19.617
REPUTATION
564
DURCHSCHNITTLICHE BEWERTUNG
5.00
BEITRÄGE
2 Dateien
DOWNLOADS
63
ALL TIME DOWNLOADS
5496
RANG
of 144.386
BEITRÄGE
0 Probleme
0 Lösungen
PUNKTESTAND
0
ANZAHL DER ABZEICHEN
0
BEITRÄGE
16 Beiträge
BEITRÄGE
0 Öffentlich Kanäle
DURCHSCHNITTLICHE BEWERTUNG
BEITRÄGE
0 Highlights
DURCHSCHNITTLICHE ANZAHL DER LIKES

Your submissions received 3 five star ratings
Awarded to Mihir Acharya on 24 Oct 2022

Your submissions were downloaded 100 or more times in a month
Awarded to Mihir Acharya on 01 Nov 2019

Publish your first review
Awarded to Mihir Acharya on 09 Oct 2019

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publish your first submission
Awarded to Mihir Acharya on 09 Oct 2019
Feeds
Veröffentlicht
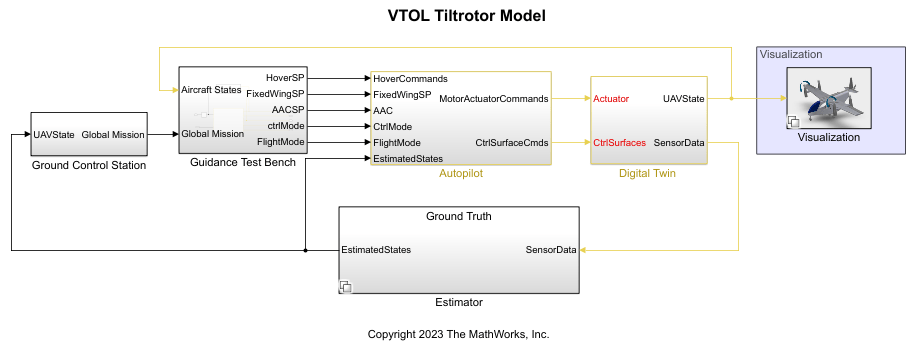
How MathWorks is Enabling Supernal’s Advanced Air Mobility Development with Integrated Simulation Systems
Co-authored by Mihir Acharya, Senior Product Manager, Robotics and Autonomous Systems at MathWorks, and Fahad Khan, Head of...
6 Tage vor
Veröffentlicht
Enabling Off-Road Simulation with MATLAB and MSU Autonomous Vehicle Simulator (MAVS)
Autonomous vehicle technology is now venturing beyond the structured confines of urban landscapes into unpredictable...
etwa 2 Monate vor

Veröffentlicht
🤖💡 Making Remote Robot Software Updates a Breeze: Discover the Power of ROS Toolbox & Automated Tools
In the dynamic world of robotics, ensuring that your robots operate with the latest software is a cornerstone of...
4 Monate vor

Veröffentlicht
Practical Challenges in Deploying Autonomy to Offroad Vehicles
In this MathWorks fireside chat, MathWorks Robotics Industry Manager, Dr. You Wu, sat down with two distinguished leaders...
4 Monate vor

Veröffentlicht
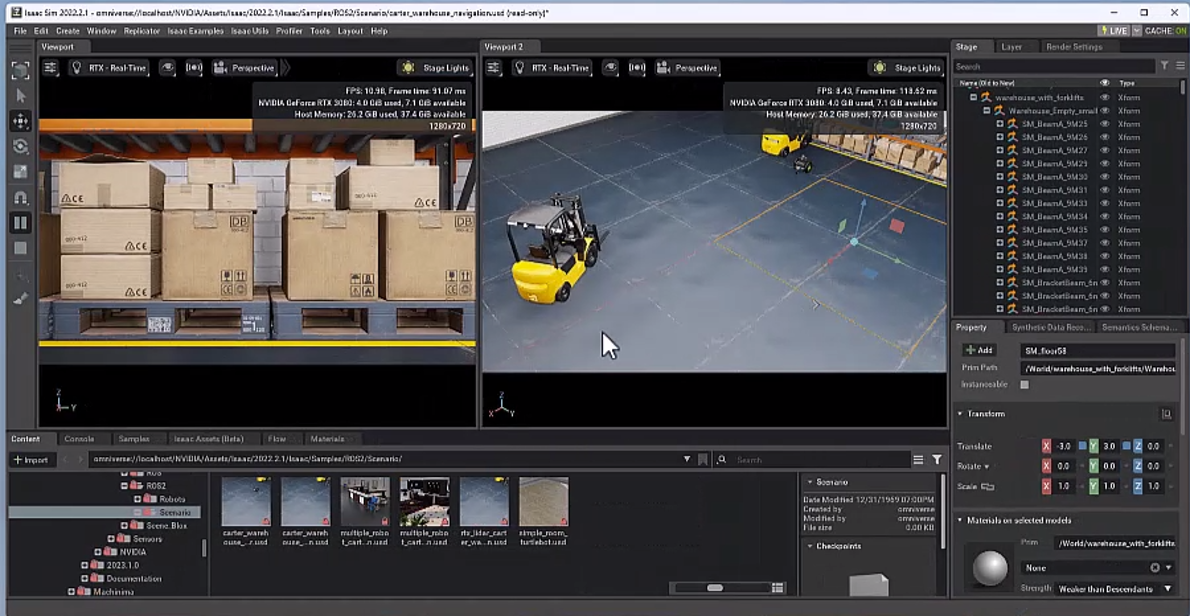
Building Realistic Robot Simulations with MATLAB and NVIDIA Isaac Sim
In this blog post, my colleague Dave Schowalter will introduce you to a new ecosystem that combines the photo-realistic...
8 Monate vor
Veröffentlicht
Overcoming 4 Key Challenges in Cobot Software Development
Close your eyes and picture a collaborative robot (Cobot) in action. What do you see? For me it’s a robot able to...
8 Monate vor
Veröffentlicht
Accelerate Aerial Autonomy with Simulink and Microsoft Project AirSim
In this blog post, we’re going to take a deep dive into a co-simulation workflow using Microsoft’s Project AirSim and...
9 Monate vor

Veröffentlicht
Prevent UAV Crashes with Integrated Simulation Workflows: Insights from AUVSI Xponential 2023
The possibility of Unmanned Aerial Systems (UAS/UAV) improving day-to-day transportation seems closer than ever, with...
11 Monate vor
Veröffentlicht
Join us at MATLAB EXPO 2023
MATLAB EXPO is back! Join us virtually on May 10-11, 2023. Attending the event is free, but you must register in advance....
12 Monate vor
Veröffentlicht
Using MATLAB for Robotics Education
This post is from Peter Corke, a professor, researcher, teacher and writer about robotics and robotic vision. The...
etwa ein Jahr vor
Veröffentlicht
Intuition Behind the Particle Filter
Autonomous Navigation with Brian Douglas: Part 5 This post is from Brian Douglas, YouTube content creator for Control...
mehr als ein Jahr vor
Veröffentlicht
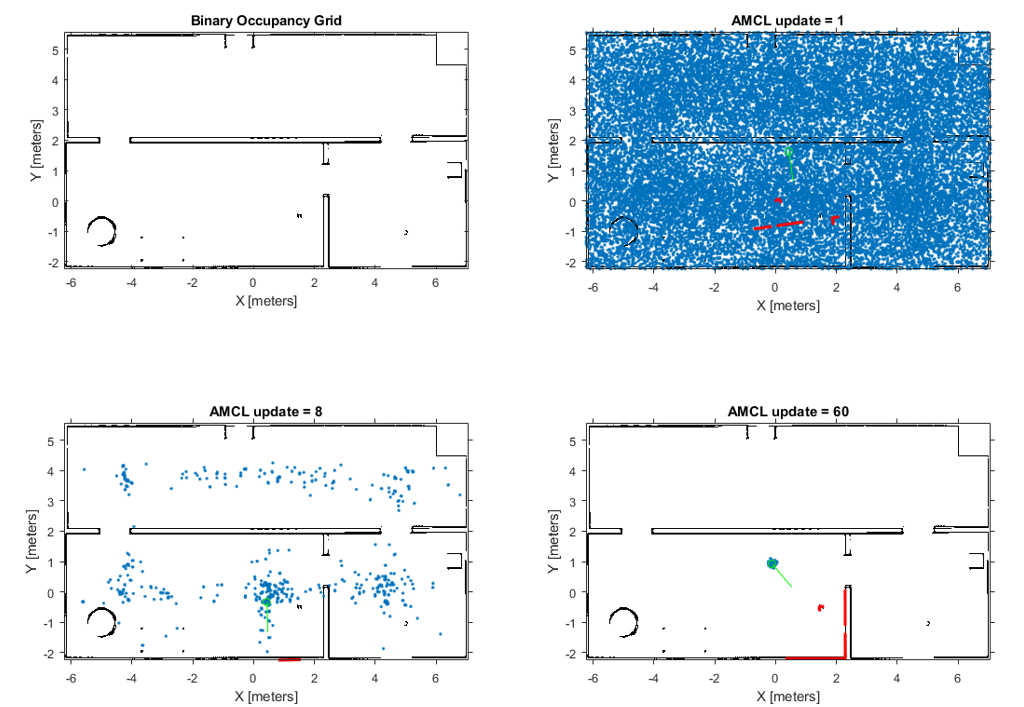
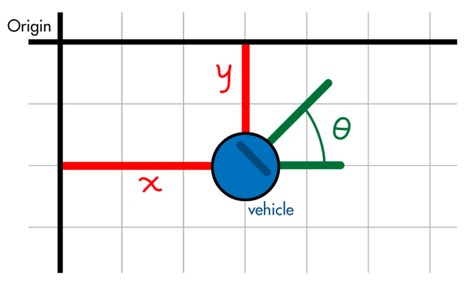
Where am I? (The Localization Problem)
Autonomous Navigation with Brian Douglas: Part 4 This post is from Brian Douglas, YouTube content creator for Control...
mehr als ein Jahr vor
Veröffentlicht
4 Capabilities of Autonomous Navigation Systems
Autonomous Navigation with Brian Douglas: Part 3 This post is from Brian Douglas, YouTube content creator for Control...
mehr als ein Jahr vor
Veröffentlicht
Autonomous Navigation with Brian Douglas, Part 2: Heuristic vs Optimal Approach for Full Autonomy
What is autonomous navigation? we learnt that in the last post of this blog series. In this one, Brian will talk about...
mehr als ein Jahr vor
Veröffentlicht
Autonomous Navigation with Brian Douglas, Part 1: Introduction
How do robots and autonomous vehicles navigate in different environments? We collaborated with Brian Douglas to help you...
mehr als ein Jahr vor
Veröffentlicht
Welcome to the Autonomous Systems Blog!
With robots delivering packages, driverless robo-taxis showing up for the rides and humans co-working with machines, we are...
mehr als ein Jahr vor

Gesendet
Inverse Kinematics of a 2-link Robot Arm
Calculate and visualize the inverse kinematics of a 2-link robot arm along with the Jacobian, and make the robot to write Hello....
mehr als 5 Jahre vor | 35 Downloads |

Gesendet
Implement Simultaneous Localization and Mapping (SLAM) with
Develop a map of an environment and localize the pose of a robot for autonomous navigation.
mehr als 5 Jahre vor | 28 Downloads |

Sie können auch eine Website aus der folgenden Liste auswählen:
Amerika
- América Latina (Español)
- Canada (English)
- United States (English)
Europa
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asien-Pazifik
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)