Specify Virtual Vehicle Test Plan
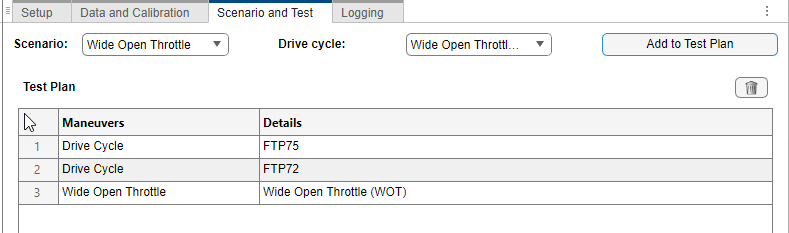
Before you build your virtual vehicle, you need to assemble your test plan. Go to the Configure section, click Scenario and Test, and select the test scenarios in this pane.
You can select two main types of test scenarios: drive cycles and vehicle performance and handling maneuvers. The available scenarios depend on the Vehicle class and Vehicle dynamics settings you chose.
You can choose the Driver setting individually for each test scenario.
Test Scenarios
For a Passenger vehicle,
if you set Vehicle dynamics to Longitudinal
dynamics, you can select:
Standard drive cycles from industry agencies and institutions. The default selection is the
FTP75drive cycle. Certain drive cycles, such asJC08andCUEDC, prescribe gear shift schedules. For additional drive cycles, see Install Drive Cycle and Maneuver Data.A
Wide Open Throttle(WOT) maneuver, setting parameters such as nominal reference speed and simulation time.
For a Passenger vehicle, if you set Vehicle
dynamics to Combined longitudinal and lateral
dynamics, you can select maneuvers for vehicle handling and stability
or straight-line performance, and drive cycles. The configured virtual vehicle model
implements the block that corresponds to the maneuver that you select.
| Maneuver | Block |
|---|---|
Increasing Steer | Slowly Increasing Steer |
Swept Sine | Swept Sine |
Sine with Dwell | Sine With Dwell |
Fishhook | Fishhook |
Braking | Acceleration and Braking |
Double Lane Change | Lane Change |
Constant Radius | Constant Radius |
Drive Cycle | |
Wide Open Throttle |
For a Motorcycle, if you
set Vehicle dynamics to In-plane
dynamics, you can select:
Standard drive cycles from industry agencies and institutions. The default selection is the
FTP75drive cycle. Certain drive cycles, such asJC08andCUEDC, prescribe gear shift schedules.A
Wide Open Throttle(WOT) maneuver, setting parameters such as nominal reference speed and simulation time.
For a Motorcycle, if you set Vehicle
dynamics to Out-of-plane dynamics, you can
select maneuvers for vehicle handling and stability:
Steady TurningHandle Hit
If you want to run your virtual vehicle in the Unreal Engine® 3D simulation environment, set 3D Scene Selection to
3D Scene. For hardware requirements, see Unreal Engine Simulation Environment Requirements and Limitations.
Driver Model — Passenger Vehicle
For a Passenger vehicle, you have several options for
Driver model, depending on your Vehicle
dynamics selection. The configured virtual vehicle model implements
the block that corresponds to the driver that you select.
| Driver | Block |
|---|---|
Longitudinal Driver | Longitudinal Driver |
Predictive Driver | Predictive Driver |
Predictive Stanley Driver | Predictive Driver |
The parameters you set here reflect the driver technique and reaction time, and the assumptions the driver makes about the vehicle while controlling it.
Driver Model — Motorcycle
If Vehicle dynamics is set to In-plane
dynamics, then Driver is set to
Longitudinal Rider. If Vehicle
dynamics set to Out-of-plane dynamics, then
Driver is set to Open
Loop.