Code Generation Verification Workflow with Simulink Test
This example shows how to perform code generation verification (CGV) for a model using test harnesses, Test Sequence blocks, and the Test Manager.
Open the Fuel-Rate Controller Model
mdl = 'sltestFuelRateControlExample';
open_system(mdl);
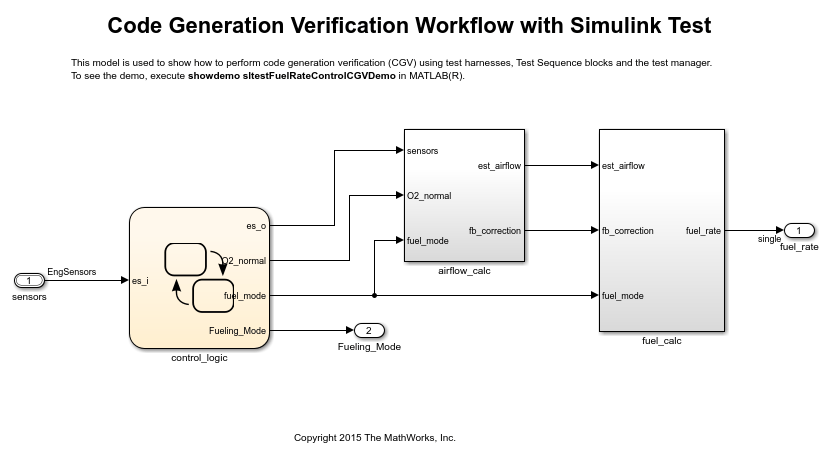
Description of the Model
This example uses a model of a fuel-rate controller for a gasoline engine. The controller uses four sensors from the system to determine the proper fuel rate. The four sensors used from the system are throttle angle, speed, EGO and manifold absolute pressure [MAP].
The model uses three subsystems to calculate the fuel rate using the sensor inputs: control logic, airflow calc, and fuel_calc. The core control logic is implemented in the Stateflow® chart named control_logic. The control logic handles single sensor failures and engine overspeed protection. If a single sensor fails, operation continues but the air/fuel mixture is richer to allow smoother running at the cost of higher emissions. If more than one sensor fails, the engine shuts down as a safety measure, since the air/fuel ratio cannot be controlled reliably.
The model estimates the airflow rate and multiplies the estimate by the reciprocal of the desired ratio to give the fuel rate.
Open the Test Harness
A Test Harness named fuel_rate_control_cgv has been created for the entire model. Note that the Scope that opens with the test harness is empty until you run the test.
sltest.harness.open(mdl,'fuel_rate_control_cgv');
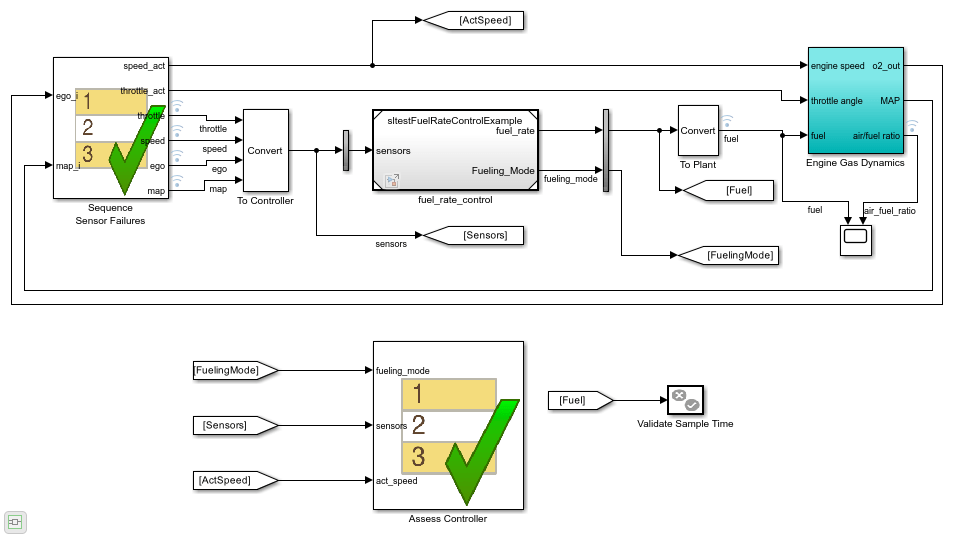
Model the Plant
The test harness has been modeled as a closed-loop test with a Test Sequence block to drive fuel-rate controller. The computed fuel_rate from the output of the controller is used to drive a model of the gasoline engine. The fuel rate combines with the actual air flow in the Engine Gas Dynamics subsystem to determine the resulting mixture ratio as sensed at the exhaust. Feedback from the oxygen sensor to the Test Sequence block provides a closed-loop adjustment of the rate estimation in order to maintain the ideal mixture ratio.
Notice that the plant has been modeled in the test harness instead of the main model. The main model is free of extraneous clutter so that code can be easily built for an ECU with minimal changes to the model.
Model Sensor Failures
The Test Sequence block named Sequence Sensor Failures models various sensor failure and engine overspeed scenarios. It accepts feedback from the plant and drives the controller with sensor data. This modeling pattern allows the Test Sequence block to control the feedback signals received by the Controller block and function as a canvas for authoring test cases. Open the Test Sequence block to see the modeled test scenarios.
open_system('fuel_rate_control_cgv/Sequence Sensor Failures');
Test Scenarios
For the first 10 seconds of simulation, the test is in stabilization mode, where the closed loop inputs from the plant are passed through to the controller. The throttle and speed inputs are set to nominal values that are within the normal operating envelope of the controller. The Stabilize_Engine step models this state. The Test then steps through the following modes:
Test_Overspeed: The throttle is ramped from 30 to 700Reset_To_Normal_Speed: The throttle is ramped down to 400Test_EGO_Fault: Simulate failure for 3 sec, then return to normal stateTest_Throttle_Fault: Simulate failure for 3 sec, then return to normal stateTest_Speed_Fault: Simulate failure for 3 sec, then return to normal stateTest_Map_Fault: Simulate failure for 3 sec, then return to normal stateTest_Multi_Fault: Simulate MAP and EGO failure for 3 secReset_MAP: Normalize MAP sensor, and simulate just EGO failure for 3 secReset_To_Normal: Terminate the test
Test Assessments
The Test Sequence block Assess Controller verifies the controller output for the various test cases modeled by the Sequence Sensor Failures block. The following assessments are modeled:
Assert that the fueling mode is in
Warmupmode for the first 4.8 secondsAssert that fueling mode switches to
Overspeedmode when the actual speed exceeds 628Assert that the fueling mode is not in
Single_Failuremode when multiple sensors have failed.
open_system('fuel_rate_control_cgv/Assess Controller');
Run a Simulation
Simulate the test harness and observe the fuel_rate and air-fuel ratio signals in the scope.
sim('fuel_rate_control_cgv')
Notice that no assertions trigger during the simulation, which indicates that all assessments modeled in Assess Controller pass.
Configure an Equivalence Test in the Test Manager
As part of code generation verification (CGV) for the controller system, it is important to assert that the functional behavior of the controller is the same during normal and software-in-the-loop (SIL) simulation modes. Use the Test Manager to perform this verification.
Open the Test Manager and test file.
sltest.testmanager.view
sltest.testmanager.TestFile('sltestFuelRateControlComparisonTestSuite.mldatx');
Model the Test Case
The equivalence test has been configured in the Test Manager so that the controller is simulated in normal and SIL modes and the numerical results are compared between these two runs. Explore the structure of the test case by clicking on different nodes of the test hierarchy in the Test Browser.
Run the Test Case
Run the test in the Test Manager. The pass/fail result is available in the Results and Artifacts pane of the Test Manager.
cgvresult = sltest.testmanager.run;
Create the Report
Generate a report to view the result of the equivalence test.
sltest.testmanager.report(cgvresult,'cgvresult.zip','IncludeTestResults',int32(0));