Use Variant Control Variables in Variant Blocks
This topic explains how to use different types of variant control variables in variant blocks.
Consider the slexVariantSubsystems model.
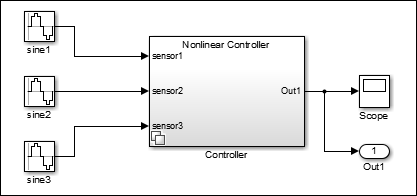
The Controller subsystem block dialog box specifies two potential
variants Linear Controller and Nonlinear Controller.
Linear Controller and Nonlinear Controller blocks are
associated with variant condition expressions V == 1 and V ==
2. Here, V is the variant control variable that determines the
active choice. You can change V to any of these types based on your
requirement.
Use Simulink.VariantControl Variables for Coherent Switching of Choices in Variant Blocks
You can associate a variant control variable of type Simulink.VariantControl with a variant activation time. Simulink.VariantControl variant control variables help you switch variant elements such as blocks and parameters coherently.
Consider a group of blocks that represents a design choice, with each block having the same variant control variable of type Simulink.VariantControl. If you set the variant activation time of these blocks to inherit from Simulink.VariantControl, the blocks inherit the activation time from the variant control variable. As a result, all the blocks have the same activation time and are activated simultaneously to generate rational simulation results and valid code.
You can define Simulink.VariantControl type of control variables in storage locations as listed in Types of Variant Control Variables (Operands) in Variant Blocks.
Open the slexVariantSubsystems model.
open_system("slexVariantSubsystems");In the block parameters dialog box of the Controller block:
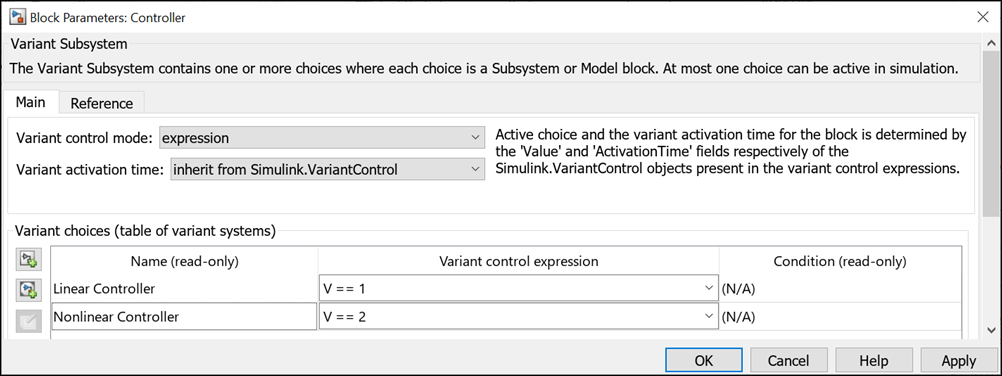
1. Specify the variant controls, V == 1 and V == 2.
set_param("slexVariantSubsystems/Controller/Linear Controller", ... "VariantControl", "V==1") set_param("slexVariantSubsystems/Controller/Nonlinear Controller", ... "VariantControl", "V==2")
2. Set Variant activation time to inherit from Simulink.VariantControl to inherit the activation time from V.
set_param("slexVariantSubsystems/Controller", "VariantActivationTime", ... "inherit from Simulink.VariantControl")
In the base workspace, define a Simulink.VariantControl object, V. Set its value to 1, variant activation time to update diagram, and then simulate the model.
V = Simulink.VariantControl(Value=1, ActivationTime="update diagram")V =
VariantControl with properties:
Value: 1
ActivationTime: 'update diagram'
During simulation, the Controller block inherits the update diagram activation time from V and the Linear Controller block becomes active.
Double-click the Controller block to see the active choice.
Simulate the model.
sim("slexVariantSubsystems");If you change the value of V to 2, the Nonlinear Controller block becomes active during simulation. You can change the value of V using this command or from Simulink.VariantControl dialog box.
V.Value = 2;
sim("slexVariantSubsystems");If you change the variant activation time of V to update diagram analyze all choices, the Controller block inherits the update diagram analyze all choices activation time from V. You can observe the inherited activation time using CompiledVariantActivationTime.
V.ActivationTime = "update diagram analyze all choices"; sim("slexVariantSubsystems"); get_param("slexVariantSubsystems/Controller", "CompiledVariantActivationTime")
ans = 'update diagram analyze all choices'
Scalar Variant Control Variables for Rapid Prototyping in Variant Blocks
Scalar MATLAB® variant control variables allow you to rapidly prototype variant choices when you are still building your model. Scalar MATLAB variant control variables help you focus more on building your variant choices than on developing the expressions that activate those choices.
You can define scalar control variables in storage locations as listed in Types of Variant Control Variables (Operands) in Variant Blocks.
Open the slexVariantSubsystems model.
open_system('slexVariantSubsystems');In the block parameters dialog box of the Controller block, specify variant controls in their simplest form as scalar variables, V == 1 and V == 2.
set_param('slexVariantSubsystems/Controller/Linear Controller', 'VariantControl', 'V==1') set_param('slexVariantSubsystems/Controller/Nonlinear Controller', 'VariantControl', 'V==2')

In the base workspace, define a variant control variable, V, set its value to 1, and then simulate the model.
V = 1;
During simulation, the Linear Controller block becomes active. Double-click the Controller block to see the active choice.
sim ('slexVariantSubsystems');Similarly, if you change the value of V to 2, the Nonlinear Controller block becomes active during simulation.
V = 2;
sim ('slexVariantSubsystems');Simulink.Parameter Type of Variant Control Variables for Code Generation in Variant Blocks
If you intend to generate code for a model containing variant blocks, specify variant control variables as Simulink.Parameter objects. Simulink.Parameter objects allow you to specify other attributes, such as data type and storage class, and control the appearance and placement of variant control variables in generated code.
You can define a variant control variable of type
Simulink.Parameterin the base workspace, a data dictionary, or the model workspace. DefiningSimulink.Parametertype of variant control variables in the mask workspace is not supported. For more information on storage locations for variant control variables, see Types of Variant Control Variables (Operands) in Variant Blocks.Simulink.Parameterobjects within structures and that have data types other thanSimulink.Busobjects are not supported.
Open the slexVariantSubsystems model.
open_system('slexVariantSubsystems');In the MATLAB Editor, define a Simulink.Parameter object, V and set its value to 1. The parameter object V uses the custom storage class ImportedExtern to define V in a separate header file external_params.h. You can further control the appearance and placement of V and prevent optimizations from eliminating storage for V using the storage class property.
V = Simulink.Parameter; V.Value = 1; V.DataType = 'int32'; V.CoderInfo.StorageClass = 'ImportedExtern'; configSet = getActiveConfigSet(gcs); set_param(configSet,CustomHeaderCode="external_params.h")
Note:
Variant control variables defined as Simulink.Parameter objects can have any of the storage classes listed in Storage Classes for Different Variant Activation Times.
You can also convert a scalar variant control variable into a Simulink.Parameter object. For more information, see Convert Variant Control Variables into Simulink.Parameter Objects.
Specify the Simulink.Parameter object as the variant control variable in the block parameters dialog box of the Controller block. Also, change the Variant activation time to code compile.
set_param('slexVariantSubsystems/Controller/Linear Controller', 'VariantControl', 'V==1') set_param('slexVariantSubsystems/Controller/Nonlinear Controller', 'VariantControl', 'V==2') set_param('slexVariantSubsystems/Controller', 'VariantActivationTime', 'code compile')
Ensure that the Linear Controller and NonLinear Controller blocks are atomic.
set_param('slexVariantSubsystems/Controller/Linear Controller', 'TreatAsAtomicUnit', 'on'); set_param('slexVariantSubsystems/Controller/Nonlinear Controller', 'TreatAsAtomicUnit', 'on');

During simulation, the Linear Controller block becomes active. Double-click the Controller block to see the active choice.
sim ('slexVariantSubsystems');Similarly, if you change the value of V to 2, the Nonlinear Controller block becomes active during simulation.
V .Value = 2;
sim ('slexVariantSubsystems');Generate code from the model and observe the code as described in Use Simulink.Parameter Type of Variant Control Variables for Code Generation in Variant Blocks (Simulink Coder).
Enumerated Types to Improve Code Readability of Variant Control Variables of Variant Blocks
Use enumerated types to give meaningful names to integers used as variant control values. For more information on enumerated type data, see Use Enumerated Data in Simulink Models.
In the MATLAB® Editor, define the classes that map enumerated values to meaningful names.
Open the slexVariantSubsystems model.
open_system("slexVariantSubsystems");In the base workspace, define the classes that map enumerated values to meaningful names.
Here, EngType is an integer-based enumeration class that is derived from the built-in data type, int32. The class has two enumeration values, Linear and NonLinear. These enumerated values have underlying integer values 0 and 1.
type EngTypeclassdef EngType < Simulink.IntEnumType
enumeration
Small (1)
Big (2)
end
methods (Static)
function retVal = addClassNameToEnumNames()
% ADDCLASSNAMETOENUMNAMES Specifies whether to add the class name
% as a prefix to enumeration member names in generated code.
% Return true or false.
% If you do not define this method, no prefix is added.
retVal = true;
end
end
end
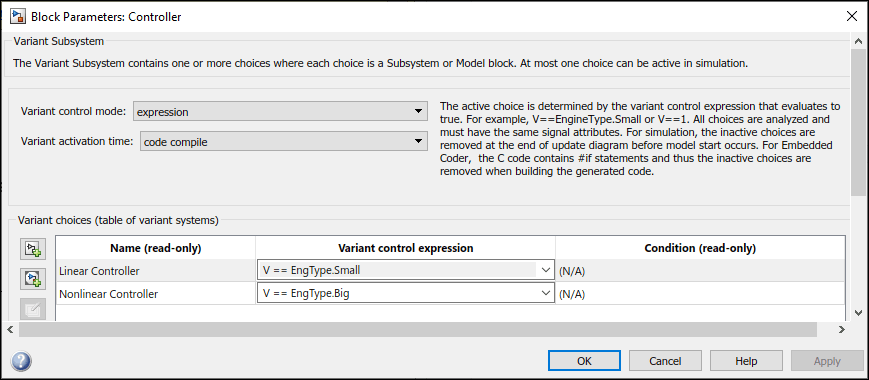
Specify the enumeration names as variant control variables in the block parameters dialog box of the Controller block. Also, change the Variant activation time to code compile.
set_param("slexVariantSubsystems/Controller/Linear Controller", ... "VariantControl", "V==EngType.Small"); set_param("slexVariantSubsystems/Controller/Nonlinear Controller", ... "VariantControl", "V==EngType.Big"); set_param("slexVariantSubsystems/Controller", ... "VariantActivationTime", "code compile");
Ensure that the Linear Controller and NonLinear Controller blocks are atomic.
set_param("slexVariantSubsystems/Controller/Linear Controller", ... "TreatAsAtomicUnit", "on"); set_param("slexVariantSubsystems/Controller/Nonlinear Controller", ... "TreatAsAtomicUnit", "on");
Define the variant control variable, V in the base workspace, specify its value as EngType.Small and then simulate the model.
V = EngType.Small;
During simulation, the Linear Controller block becomes active. Double-click the Controller block to see the active choice.
sim ("slexVariantSubsystems");The code that you generate using enumerated types contains the names of the values rather than integers.
slbuild("slexVariantSubsystems");### Searching for referenced models in model 'slexVariantSubsystems'. ### Total of 1 models to build. ### Starting build procedure for: slexVariantSubsystems ### Successful completion of build procedure for: slexVariantSubsystems Build Summary Top model targets: Model Build Reason Status Build Duration ======================================================================================================================== slexVariantSubsystems Information cache folder or artifacts were missing. Code generated and compiled. 0h 0m 25.774s 1 of 1 models built (0 models already up to date) Build duration: 0h 0m 28.614s
Open the generated header file slexVariantSubsystems_types.h. The file defines the enumerated type EngType.
cfile=fullfile(pwd, "slexVariantSubsystems_ert_rtw", "slexVariantSubsystems_types.h"); coder.example.extractLines(cfile, ... "#ifndef V", "/* MW_VALIDATE_PREPROCESSOR_VARIANT_CHOICES */", 1, 0);
#ifndef V #define V EngType_Small #endif
In the slexVariantSubsystems.c file, the values 1 and 2 are represented as EngType_Small and EngType_Big.
cfile=fullfile(pwd, "slexVariantSubsystems_ert_rtw", "slexVariantSubsystems.c"); coder.example.extractLines(cfile, ... "/* Model step function */", "/* Model initialize function */", 1, 0);
/* Model step function */
void slexVariantSubsystems_step(void)
{
#if V == EngType_Small
real_T denAccum;
#endif
real_T lastSin_g_tmp;
real_T lastSin_i_tmp;
real_T lastSin_tmp;
real_T rtb_sine1;
real_T rtb_sine1_tmp;
real_T rtb_sine3;
real_T rtb_sine3_tmp;
real_T sine2;
real_T sine2_tmp;
/* Sin: '<Root>/sine1' */
if (slexVariantSubsystems_DW.systemEnable != 0) {
lastSin_tmp = 1.0471975511965976 *
((slexVariantSubsystems_M->Timing.clockTick0) * 0.01);
slexVariantSubsystems_DW.lastSin = sin(lastSin_tmp);
slexVariantSubsystems_DW.lastCos = cos(lastSin_tmp);
slexVariantSubsystems_DW.systemEnable = 0;
}
lastSin_tmp = slexVariantSubsystems_DW.lastSin * 0.9999451693655121;
rtb_sine1_tmp = slexVariantSubsystems_DW.lastCos * 0.9999451693655121;
rtb_sine1 = ((slexVariantSubsystems_DW.lastCos * -0.010471784116245792 +
lastSin_tmp) * 0.9999451693655121 + (rtb_sine1_tmp -
slexVariantSubsystems_DW.lastSin * -0.010471784116245792) *
0.010471784116245792) * 0.1;
/* End of Sin: '<Root>/sine1' */
/* Sin: '<Root>/sine2' */
if (slexVariantSubsystems_DW.systemEnable_e != 0) {
lastSin_g_tmp = ((slexVariantSubsystems_M->Timing.clockTick0) * 0.01);
slexVariantSubsystems_DW.lastSin_g = sin(lastSin_g_tmp);
slexVariantSubsystems_DW.lastCos_n = cos(lastSin_g_tmp);
slexVariantSubsystems_DW.systemEnable_e = 0;
}
lastSin_g_tmp = slexVariantSubsystems_DW.lastSin_g * 0.9999500004166653;
sine2_tmp = slexVariantSubsystems_DW.lastCos_n * 0.9999500004166653;
/* Sin: '<Root>/sine2' */
sine2 = ((slexVariantSubsystems_DW.lastCos_n * -0.009999833334166664 +
lastSin_g_tmp) * 0.9999500004166653 + (sine2_tmp -
slexVariantSubsystems_DW.lastSin_g * -0.009999833334166664) *
0.009999833334166664) * 2.0;
/* Sin: '<Root>/sine3' */
if (slexVariantSubsystems_DW.systemEnable_b != 0) {
lastSin_i_tmp = 0.5235987755982988 *
((slexVariantSubsystems_M->Timing.clockTick0) * 0.01);
slexVariantSubsystems_DW.lastSin_i = sin(lastSin_i_tmp);
slexVariantSubsystems_DW.lastCos_i = cos(lastSin_i_tmp);
slexVariantSubsystems_DW.systemEnable_b = 0;
}
lastSin_i_tmp = slexVariantSubsystems_DW.lastSin_i * 0.9999862922474267;
rtb_sine3_tmp = slexVariantSubsystems_DW.lastCos_i * 0.9999862922474267;
rtb_sine3 = ((slexVariantSubsystems_DW.lastCos_i * -0.00523596383141958 +
lastSin_i_tmp) * 0.9999862922474267 + (rtb_sine3_tmp -
slexVariantSubsystems_DW.lastSin_i * -0.00523596383141958) *
0.00523596383141958) * 0.3;
/* End of Sin: '<Root>/sine3' */
/* Outputs for Atomic SubSystem: '<Root>/Controller' */
#if V == EngType_Small
/* Outputs for Atomic SubSystem: '<S1>/Linear Controller' */
/* Update for DiscreteTransferFcn: '<S2>/Discrete Transfer Fcn' */
denAccum = (sine2 - 0.09 *
slexVariantSubsystems_DW.DiscreteTransferFcn_states[0]) - 0.5 *
slexVariantSubsystems_DW.DiscreteTransferFcn_states[1];
/* VariantMerge generated from: '<S1>/Out1' incorporates:
* DiscreteTransferFcn: '<S2>/Discrete Transfer Fcn'
* Sum: '<S2>/Add'
*/
slexVariantSubsystems_Y.Out1 = ((0.7 *
slexVariantSubsystems_DW.DiscreteTransferFcn_states[1] +
slexVariantSubsystems_DW.DiscreteTransferFcn_states[0]) + rtb_sine1) +
rtb_sine3;
/* Update for DiscreteTransferFcn: '<S2>/Discrete Transfer Fcn' */
slexVariantSubsystems_DW.DiscreteTransferFcn_states[1] =
slexVariantSubsystems_DW.DiscreteTransferFcn_states[0];
slexVariantSubsystems_DW.DiscreteTransferFcn_states[0] = denAccum;
/* End of Outputs for SubSystem: '<S1>/Linear Controller' */
/* End of Outputs for SubSystem: '<Root>/Controller' */
#elif V == EngType_Big
/* Outputs for Atomic SubSystem: '<S1>/Nonlinear Controller' */
/* VariantMerge generated from: '<S1>/Out1' incorporates:
* Lookup_n-D: '<S3>/1-D Lookup Table'
* Sin: '<Root>/sine2'
* Sum: '<S3>/Add'
*/
slexVariantSubsystems_Y.Out1 = (rtb_sine1 + look1_binlxpw(sine2,
slexVariantSubsystems_ConstP.uDLookupTable_bp01Data,
slexVariantSubsystems_ConstP.uDLookupTable_tableData, 10U)) + rtb_sine3;
/* End of Outputs for SubSystem: '<S1>/Nonlinear Controller' */
#endif
/* Update for Sin: '<Root>/sine1' */
rtb_sine1 = slexVariantSubsystems_DW.lastSin;
slexVariantSubsystems_DW.lastSin = slexVariantSubsystems_DW.lastCos *
0.010471784116245792 + lastSin_tmp;
slexVariantSubsystems_DW.lastCos = rtb_sine1_tmp - rtb_sine1 *
0.010471784116245792;
/* Update for Sin: '<Root>/sine2' */
rtb_sine1 = slexVariantSubsystems_DW.lastSin_g;
slexVariantSubsystems_DW.lastSin_g = slexVariantSubsystems_DW.lastCos_n *
0.009999833334166664 + lastSin_g_tmp;
slexVariantSubsystems_DW.lastCos_n = sine2_tmp - rtb_sine1 *
0.009999833334166664;
/* Update for Sin: '<Root>/sine3' */
rtb_sine1 = slexVariantSubsystems_DW.lastSin_i;
slexVariantSubsystems_DW.lastSin_i = slexVariantSubsystems_DW.lastCos_i *
0.00523596383141958 + lastSin_i_tmp;
slexVariantSubsystems_DW.lastCos_i = rtb_sine3_tmp - rtb_sine1 *
0.00523596383141958;
/* Update absolute time for base rate */
/* The "clockTick0" counts the number of times the code of this task has
* been executed. The resolution of this integer timer is 0.01, which is the step size
* of the task. Size of "clockTick0" ensures timer will not overflow during the
* application lifespan selected.
*/
slexVariantSubsystems_M->Timing.clockTick0++;
}
Note that for variant blocks with startup activation time, only enumerations that are defined using these techniques are supported:
Using the function
Simulink.defineIntEnumTypeBy subclassing built-in integer data types
int8,int16,int32,uint8, oruint16, or by subclassingSimulink.IntEnumType
These enumerations are also supported when permanently stored in a Simulink® data dictionary. See Enumerations in Data Dictionary.
Use Simulink.VariantExpression Objects for Variant Condition Reuse of Variant Blocks
After identifying the variant values that your model requires, you can construct complex variant conditions to control the activation of your variant blocks by defining variant conditions as Simulink.VariantExpression objects. Simulink.VariantExpression objects enable you to reuse common variant conditions across models and help you encapsulate complex variant condition expressions.
You can specify the whole of a variant condition expression or only the variant control variable inside the Condition property of the Simulink.VariantExpression object.
Note:
You can define a variant control variable of type
Simulink.VariantExpressiononly in the base workspace or in a data dictionary. Defining variant controls usingSimulink.VariantExpressionobjects in a mask workspace or the model workspace is not supported. For more information on storage locations for variant control variables, see Types of Variant Control Variables (Operands) in Variant Blocks.Using
Simulink.VariantExpressionwithin structures is not supported.
Open the slexVariantSubsystems model.
open_system("slexVariantSubsystems");In the MATLAB® Command Window, define variant control expressions in Simulink.VariantExpression objects.
V_LinearController = Simulink.VariantExpression("V==1"); V_NonLinearController = Simulink.VariantExpression("V==2");
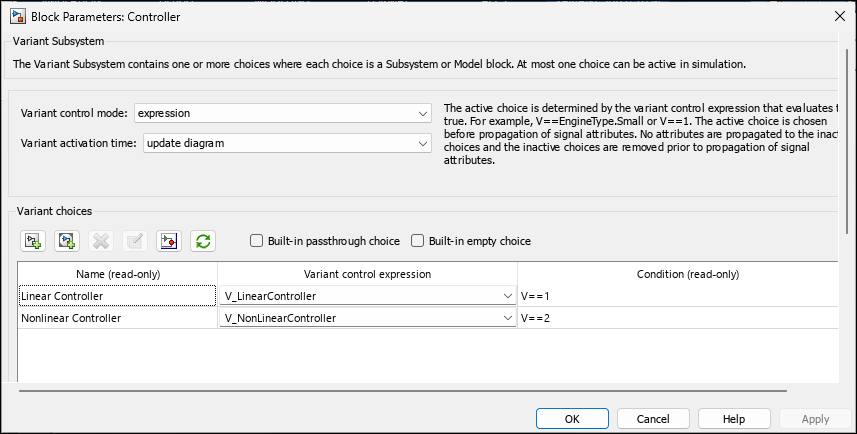
Specify the Simulink.VariantExpression objects as the variant control variables in the block parameters dialog box of the Controller block.
set_param("slexVariantSubsystems/Controller/Linear Controller", ... "VariantControl", "V_LinearController"); set_param("slexVariantSubsystems/Controller/Nonlinear Controller", ... "VariantControl", "V_NonLinearController");
Open the Block Parameters dialog box for the Controller block in the model. The Condition column of the Variant Choices table automatically shows the Boolean conditions that the Simulink.VariantExpression objects represent.
Set the value of variant control variable V as 1 and simulate the model.
V = 1;
sim("slexVariantSubsystems");During simulation, the Linear Controller block becomes active. Double-click the Controller block to see the active choice. Using this approach, you can develop complex variant condition expressions that are reusable.
Structures to Group Related Variant Control Variables of Variant Blocks
Use MATLAB® structure elements to group related variant control variables. You can control the characteristics of structures in the generated code and the placement of structures in memory. For more information, see struct.
Note that you can define a variant control variable of type structure only in the base workspace or in a data dictionary. Defining the structure type of variant control variables in the mask or model workspace is not supported. For more information on storage locations for variant control variables, see Types of Variant Control Variables (Operands) in Variant Blocks.
Open the slexVariantSubsystems model.
open_system('slexVariantSubsystems');In the base workspace, define a structure to store related variant control variables. Add fields to the structure using dot notation.
Controller.Linear = 1; Controller.NonLinear = 0;
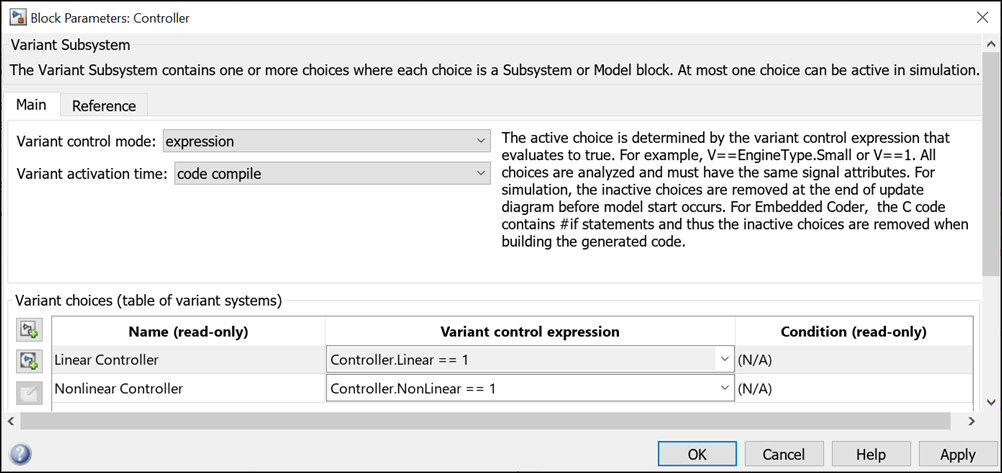
In the block parameters dialog box of the Controller block, specify variant controls using dot notation. Also, change the Variant activation time to code compile.
set_param('slexVariantSubsystems/Controller/Linear Controller', ... 'VariantControl', 'Controller.Linear==1'); set_param('slexVariantSubsystems/Controller/Nonlinear Controller', ... 'VariantControl', 'Controller.NonLinear==1'); set_param('slexVariantSubsystems/Controller', ... 'VariantActivationTime', 'code compile');
Ensure that the Linear Controller and NonLinear Controller blocks are atomic.
set_param('slexVariantSubsystems/Controller/Linear Controller', ... 'TreatAsAtomicUnit', 'on'); set_param('slexVariantSubsystems/Controller/Nonlinear Controller', ... 'TreatAsAtomicUnit', 'on');
Simulate the model. During simulation, the Linear Controller block becomes active.
sim('slexVariantSubsystems');Double-click the Controller block to see the active choice.
Now, generate code from the model. For information on how to generate code, see Generate Code Using Embedded Coder (Embedded Coder).
The generated code contains both Linear and Nonlinear choices in the preprocessor conditionals #if and #elif because of the code compile activation time.
The generated header file slexVariantSubsystems_types.h defines a structure type that has a random name and initializes the variables Controller_Linear and Controller_NonLinear.
% #ifndef Controller_Linear % #define Controller_Linear 1 % #endif % % #ifndef Controller_NonLinear % #define Controller_NonLinear 0 % #endif % % #ifndef DEFINED_TYPEDEF_FOR_struct_XfS20q0AY2qBc3cwjMQEtF_ % #define DEFINED_TYPEDEF_FOR_struct_XfS20q0AY2qBc3cwjMQEtF_ % % typedef struct { % real_T Linear; % real_T NonLinear; % } struct_XfS20q0AY2qBc3cwjMQEtF;
The source file slexVariantSubsystems.c defines the logic for Controller_Linear and Controller_NonLinear choices.
% void slexVariantSubsystems_step(void) % { % #if Controller_Linear == 1 % logic of Linear Controller % #elif Controller_NonLinear == 1 % logic of Nonlinear Controller % #endif % }
For more information, see Organize Data into Structures in Generated Code (Embedded Coder).